모델 설명
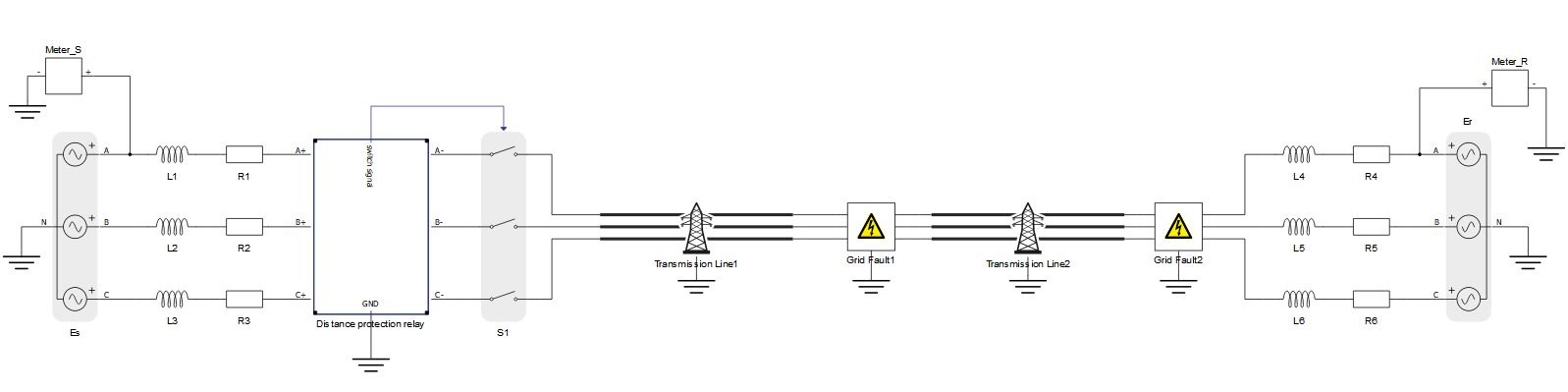
모델의 전기 부분은 그림 2 에 나와 있습니다.회로도의 양 측면에는 3 상 그리드 임피던스. 그리드의 매개 변수는 다음과 같습니다.그리드는 길이 100 킬로미터의 전송 라인에 의해 연결 됩니다. 전송 라인에는 중간에 3 상 결함과 전송 라인 끝에 1 상 결함의 두 가지 결함이 있습니다.왼쪽의 그리드와 전송 라인 사이에는 거리 보호 릴레이가 있습니다.이 릴레이는 옆에 위치한 접촉기를 제어합니다.
그림 2:거리 보호 릴레이에 대한 태풍 힐의 개략도 모델
거리 보호 릴레이 블록에 구현 된 보호 로직은 폐쇄 개방 차이 연산자(코도)알고리즘과 측정을 위한 결함 검출을 포함하며,이는 트립 로직에 입력을 제공합니다. 이것은 그림 3 에 자세히 나와 있습니다.
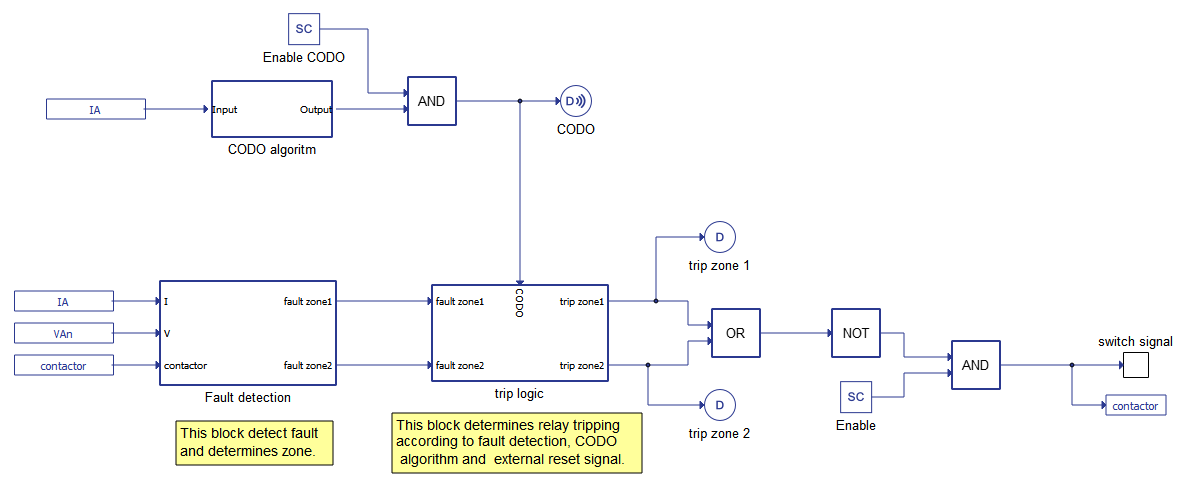
결함 탐지 구획은 전송 선에 있는 결함을 검출하고 결함이 지역 1,지역 2 안쪽에 또는 둘 다에서 인지 결정에 책임 있습니다. 결함 검출은 단계에 있는 전압 그리고 현재에 따라 결함 임피던스를 측정합니다:릴레이에 의해 관찰된 임피던스를 측정하고,릴레이에 의해 측정된 전압 및 전류의 값을 각각 측정한다.
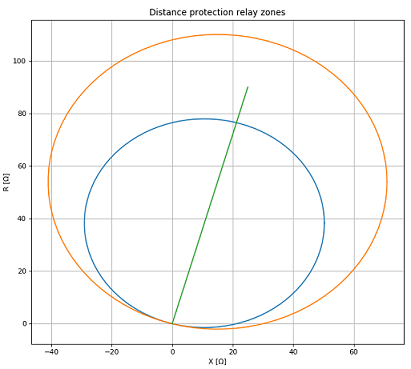
복소면의 각 점은 다음 공식에 따라 아르 자형(엑스-축)과 엑스(와이-축)에 의해 정의됩니다.
측정=지 측정 죄(1)
측정=지 측정 죄(1)
측정=지 측정 죄(1)
측정 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 저항과 릴레이에 의해 관찰 된 리액턴스,및 2018,나는 전류와 전압의 위상차이다.
오류 감지 블록은 영역 도달 및 전송 라인에 대한 측정 값 및 설정에 따라 오류 영역 1 및 오류 영역 2 에 오류 신호를 제공합니다. 거리 보호 영역의 미리보기는 그림 4 에 표시된 거리 보호 릴레이 구성 요소의 미리 보기 버튼을 클릭하여 액세스할 수 있습니다.
그림 4: 보호 영역 미리보기
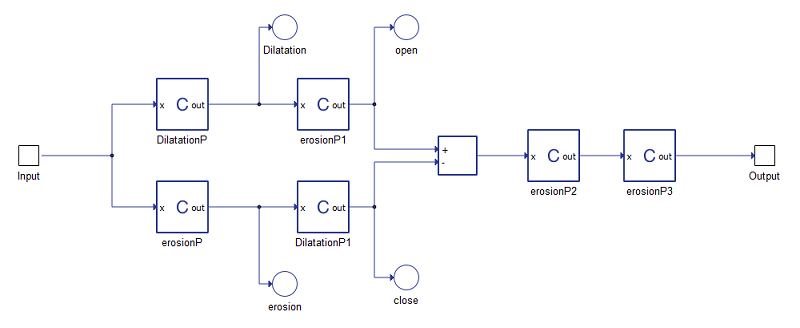
비주기적인 과도 신호에 대한 비선형 신호 변환 도구입니다.수학 계산에는 덧셈,뺄셈,최대 및 최소 연산 만 포함됩니다.application.MM 팽창과 침식의 두 가지 기본 작업으로 구성됩니다. 기본 정의는 다음과 같습니다:
팽창도:
ydn=f⊕gn=maxf(n-m+gm,n-m∈Df,m∈Dg
부식:
엔=f⊖gn=minf(n+m gm,n+m∈Df,m∈Dg
열기:
y0n=f⊖g⊕g(n)
닫:
ycn=f⊕g⊖g(n)
알고리즘에서는 우리를 얻을 수 있습니다 CODO 신호를 사용하여 형성된 방정식(4), (5),(6), 과(7)입니다. 모델에서의 실현은 그림 5 에 나와 있습니다.
그림 5: 보호 영역 미리보기
마지막으로,트립 로직 블록은 결함 검출 신호,코도 알고리즘 신호 및 외부 리셋 신호에 따라 트립 신호를 계산하는 역할을 한다.