alusten stabilointi-ja stabilointijärjestelmät
merellä olevalla aluksella on kuusi vapausastetta eli
1. Heitto, 2. Veto, 3. Pitch, 4. Yaw, 5. Sway, 6. Aalto.
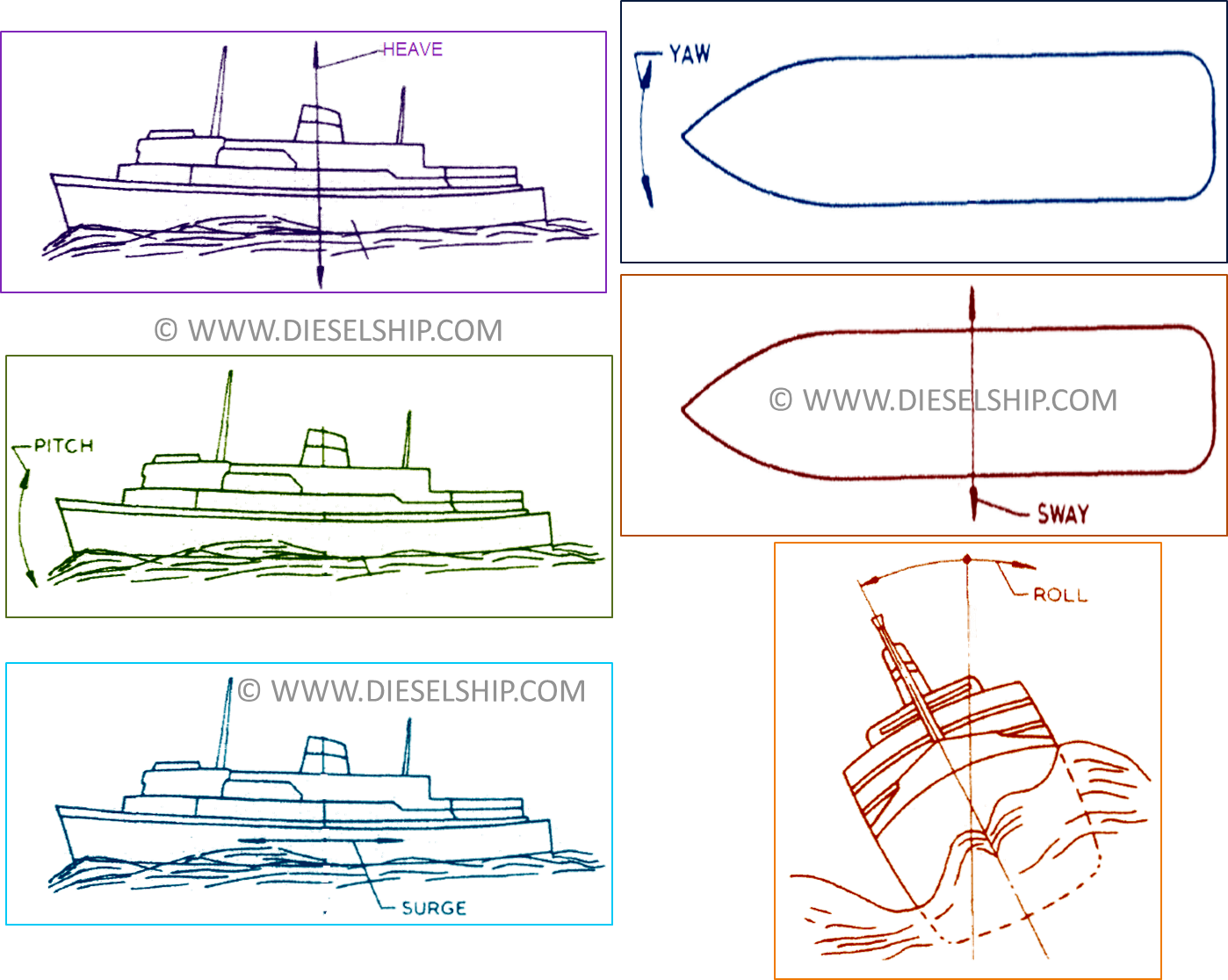
– kaikista näistä liikkeistä ainoastaan vierintäliikettä voidaan käytännössä tehokkaasti vähentää asentamalla pilssiämpäreitä, valssauksen estosäiliöitä tai vakaimia.
– alukseen on asennettu vakautusjärjestelmä liikkuvan liikkeen vähentämiseksi. Tämä saavutetaan antamalla päinvastainen voima, että liike yrittää pyörittää alusta.
– aluksissa käytetään kahta perusstabilointijärjestelmää;
- fin-stabilointi
- säiliön stabilointijärjestelmä.
Fin stabilointi
perustoiminto:
Oletko koskaan kokeillut tätä autossa matkustaessasi??
avaa ikkunasuojus ja ojenna kaikki kuviosi yhteen kasvot menosuuntaan kämmen tietä kohti auton liikkuessa eteenpäin tietyllä nopeudella ja varmista, että sormesi ovat suorina.
tässä tilanteessa kätesi pysyy suorana etkä kohtaa mitään voimaa sormiesi ylä-tai alapuolella.
1. Nyt hieman nosta sormia ylöspäin ja näet, että on hissi sormien alla ja kätesi on taipumus mennä ylöspäin tätä kutsutaan ’hissi’.
2. Laita nyt kaikki sormesi alaspäin näet, että kätesi päällä on nostovoima ja kätesi pyrkii menemään alaspäin tätä kutsutaan ’työntämiseksi’ tai ’alaspäin nostamiseksi’
3. Nyt hidastaa auton ja vähentää nopeutta ja toista edellä mainitut vaiheet näet hissin ja työntövoima on huomattavasti pienempi, mikä tarkoittaa, että ilmanvastus nopeus on tärkeämpää on hyvä nosto tai työntää.
edellä mainittu tekniikka yksinkertaisesti selittää aluksissa käytettävien lentokonefolio-tai kantosiipialusten vastuksen, positiivisen ja negatiivisen nosteen.
Evävakaimet
– evien stabilointiteho syntyy niiden liikkumisesta meren läpi (vastusvoima) ja nosteesta”, joka syntyy veden virtaamisesta ”aerofoilin” tai kantosiipialuksen muodon ylä-ja alapuolella.
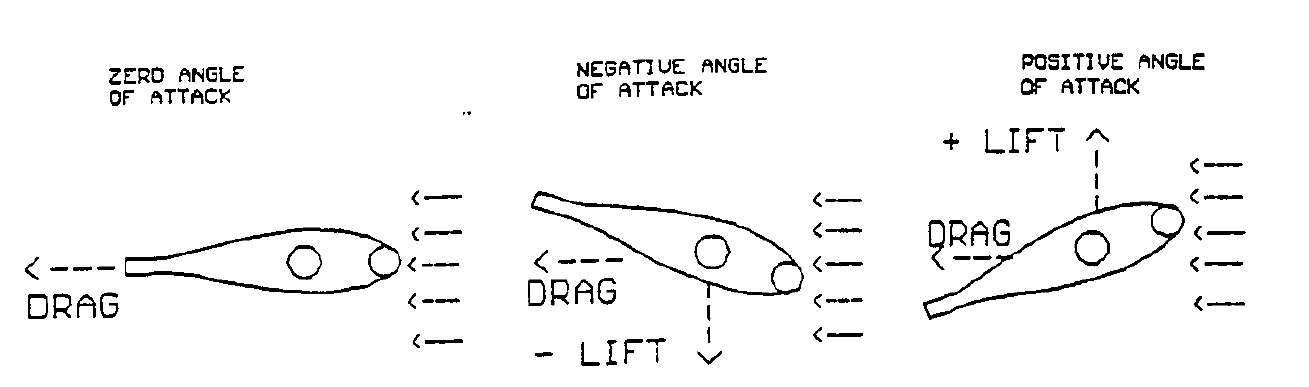
kohtauskulma:
– kun laivassa ei ole lainkaan vierintäliikettä, evät pysyvät 0o-kulmassa eikä eville tarjota nosto-tai työntövoimaa, kuten yllä olevassa kuvassa on esitetty.
negatiivinen & positiivinen kohtauskulma:
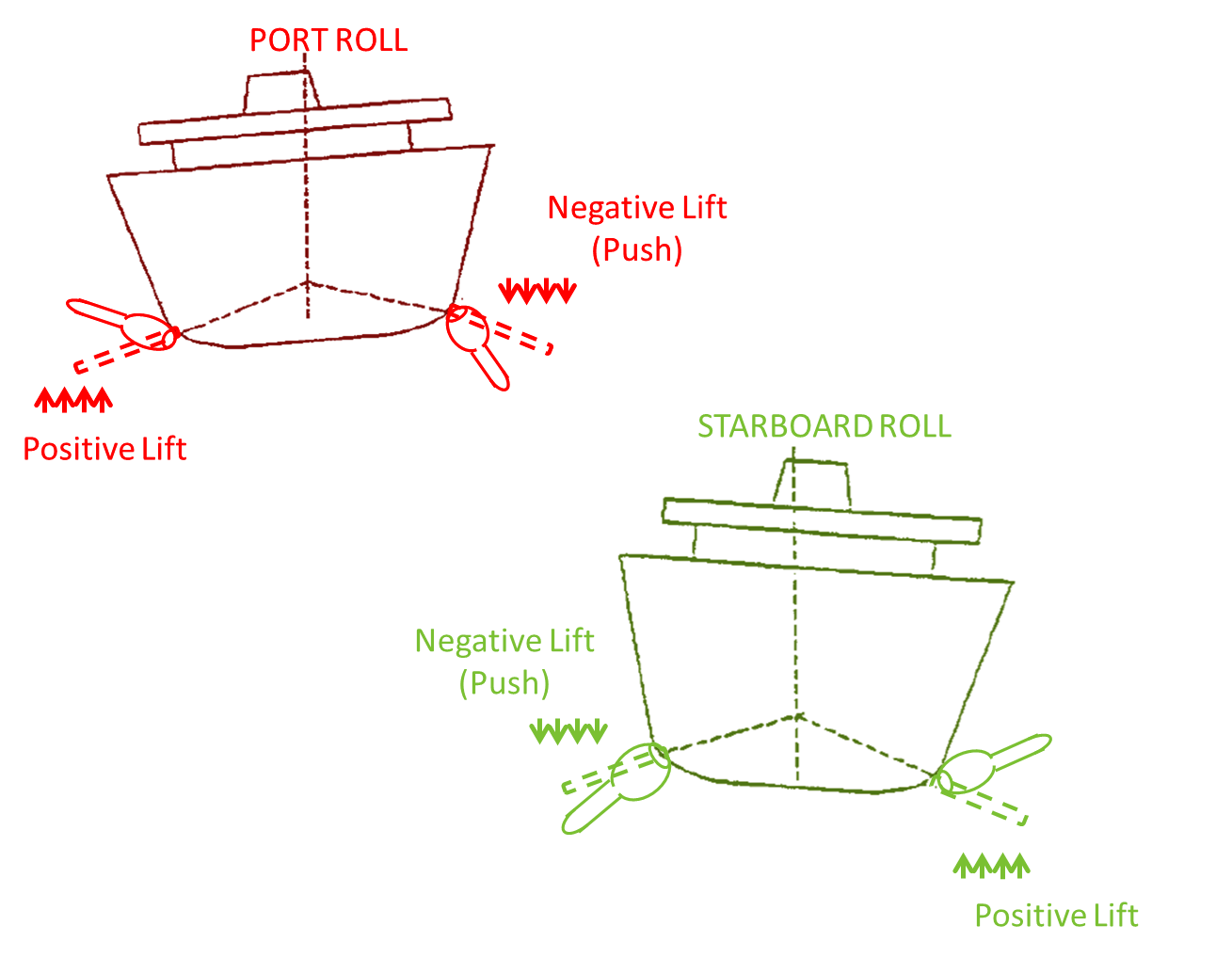
– heti kun alus alkaa vieriä, minkä sensorit aistivat, esimerkiksi jos alus rullaa vakaasta tilasta paapuurin puolelle, paapuurin evä kallistuu ylöspäin (negatiivinen kohtauskulma), joka kokee negatiivisen nosteen eli evä kokee noston pohjasta tai työntymisen pohjasta. Tämä voima nostaa aluksen paapuurin puolen kumotakseen liikkuvan liikkeen paapuurin puolelle ja samalla tyyrpuurin evä kallistuu alaspäin (positiivinen kohtauskulma), minkä vuoksi alus kokee vetoa tyyrpuurin puolelle näiden kahden voiman yhteenlasku kumoaa aalto-tai tuulivoiman, joka pyrkii kallistamaan alusta paapuurin puolelle.
– nyt laiva pyrkii rullaamaan tyyrpuurin puolelle ja edellä mainittu toiminta käännetään yksinkertaisesti päinvastaiseksi tarjoten työntövoiman tyyrpuurin puolelle ja vedon paapuurin puolelle.
– kun evän etureunaa kallistetaan ylöspäin, veden virtaus Profiilin yläosan yli tuottaa nostetta paineen laskun vuoksi, kun taas nostopaine saadaan virtaamalla alapuolta pitkin. Alaspäin kallistus etureunan evä, kääntää vaikutus, niin että paineen lasku tapahtuu alapuolella ja lisääntynyt paine yläosassa antaa alaspäin voima.
– ilman aluksen kohtuullista eteenpäin suuntautuvaa liikettä (vastusta) evät ovat tehottomia. Niinpä tällaiset aktiiviset evävakaimet on asennettu nopeampiin alustyyppeihin, ja ne toimivat ehkä viidentoista tai useamman solmun nopeudella.
Evätyyppi
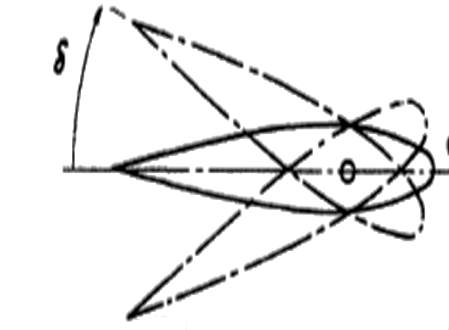
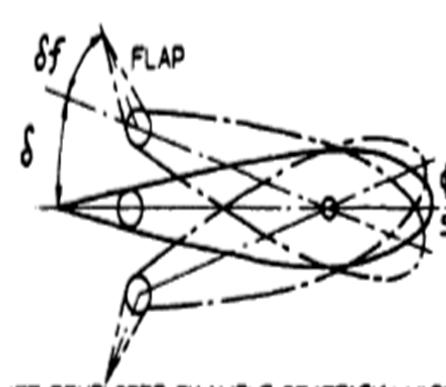
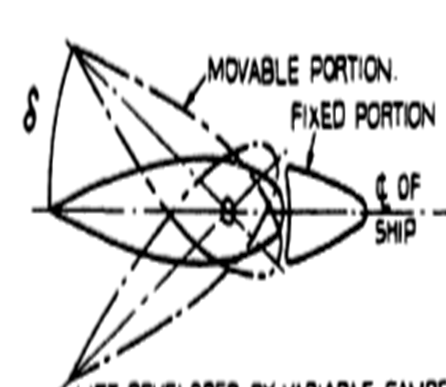
– kantosiipialus voi olla kokonaan liikuteltava, siivekkeillä tai ilman tai osittain kiinteä, osittain liikuteltava, nämä evät ovat kallistettuja, yleensä hydraulisesti, vaiheessa, jossa rulla on pitkällä aaltojaksolla, 90° pois vaiheesta resonanssissa ja vaiheessa, jossa rullaus kiihtyy lyhyillä jaksoilla.
evät, joissa on kaikki liikuteltava pinta
 evät, joissa on kaikki liikuteltava pinta ja lisäksi pyrstöläppä
evät, joissa on kaikki liikuteltava pinta ja lisäksi pyrstöläppä
evät, joissa on kiinteä rakenne
– ei-sisäänvedettäviä eviä käytetään yleisesti silloin, kun rungon sisällä on rajoitetusti tilaa. Ne asennetaan yleensä pilssin kääntöpaikalle, eivätkä ne ulotu aluksen kyljestä pystysuoraa viivaa pidemmälle tai aluksen pohjan vaakasuoran viivan alapuolelle, jotta minimoidaan riski joutua kosketuksiin laiturin seinän tai laiturin pohjan kanssa.
– eväakseli, johon evä on kiinteästi kiinnitetty, kulkee runkoon hitsatussa tai pultatussa kiinnityslevyssä olevan merirauhasen läpi ja sitä tukee kaksi merkittävää laakeria.eväakselin sisäpäähän avattava kaksipäinen vipu käynnistetään sähkökäyttöisestä säätöpumpusta saatavilla hydraulisilla pässeillä.
miten eväliikettä hallitaan?
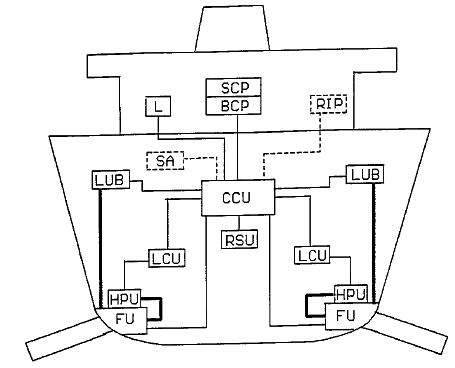
paksummat linjat = Hydrauliset linjat; ohuemmat linjat = sähköjohdot
SCP = SOLAS-Ohjauspaneeli, BCP = komentosillan Ohjauspaneeli, L = aluksen Loki, RIP = kauko-Osoitinpaneeli, SA = aluksen automaatio, LUB = Voiteluöljysäiliö, CCU = keskusohjausyksikkö, RSU = Rullatunnistinyksikkö, LCU = paikallinen Ohjausyksikkö, HPU = hydraulinen voimayksikkö, FU = Fin-yksikkö.
– fin-liikkeen hallinta on automaattista ja se on yleensä johdettu gyroskooppisesta tunnistuslaitteesta, joka yksinkertaisimmillaan — nopeuden säätö – perustuu yhteen pieneen, sähkökäyttöiseen gyroskooppiin, joka on asennettu vaakasuoraan akselinsa ympäri.
– aluksen rullauksen kulmanopeus saa gyroskoopin prosessoimaan jousia vastaan nopeudella suhteessa nopeuteen, ja se synnyttää pienen voiman, jota hydraulinen releyksikkö vahvistaa hydraulisesti niin, että se antaa riittävän tehon säädettävän syöttöpumpun ohjaukseen sopivan kytkennän kautta.
– osa liitoksesta on kytketty eväakseliin, jotta pumpun ohjaukseen välitetään peruutussignaali ja evä saadaan lepäämään anturiyksikön vaatimaan kallistuskulmaan.
– tällainen ohjaus on usein asennettu pieniin asennuksiin, yleensä taloudellisista syistä, ja se on tehokkain kaikuvaa valssausta vastaan.
– Laivat rullaavat harvoin puhtaasti resonanssitilassa; merenkäynti on usein hyvin sekavaa. Monimutkaisempia ja kalliimpia ohjausjärjestelmiä tarvitaan käsittelemään yhtäkkiä levitettyä rullausta, valssausta resonanssiaikoina ja valssausta olosuhteissa, jotka johtuvat useiden aaltotaajuuksien yhdistelmästä.
– pystypitävään gyroskooppiin ja nopeushyroskooppiin perustuva tunnistusyksikkö, joka on yhdistetty differentiaatio-ja yhteenlaskuyksiköiksi, mahdollistaa fin-liikkeen ohjaamisen yhdistelmäfunktiolla, joka on johdettu rullauskulmasta, rullan nopeudesta ja rullan kiihtyvyydestä. Lisäämällä ”natural list” – yksikön stabilointi saavutetaan suunnilleen rullan keskikohdan kohdalta ja näin vähennetään sekä työntövoimaa että stabiloivaa tehontarvetta. Tätä kutsutaan kompensoiduksi valvontajärjestelmäksi, ja sitä käytetään yleensä suurissa laitoksissa.
RSU-Roll Sensor Unit yksityiskohtaisesti (Compensated control system)
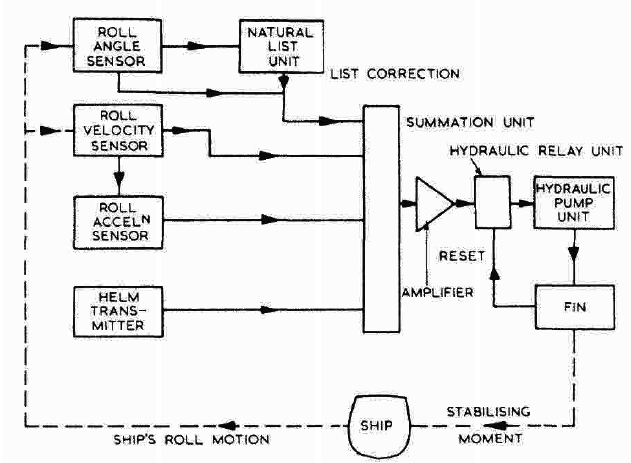 – rullan pieneneminen yli 90%, tyypillisesti 30° out-to-out alennetaan alle 3° out-out, voidaan saavuttaa resonanssissa ja pieniä jäännösrullia voidaan ylläpitää useilla taajuuksilla. Koska vakautusteho kuitenkin vaihtelee aluksen nopeuden neliönmuotoisena, evät ovat vähiten tehokkaita alhaisella tai nollanopeudella, jossa ne toimivat vain ylimääräisinä pilssiämpäreinä.
– rullan pieneneminen yli 90%, tyypillisesti 30° out-to-out alennetaan alle 3° out-out, voidaan saavuttaa resonanssissa ja pieniä jäännösrullia voidaan ylläpitää useilla taajuuksilla. Koska vakautusteho kuitenkin vaihtelee aluksen nopeuden neliönmuotoisena, evät ovat vähiten tehokkaita alhaisella tai nollanopeudella, jossa ne toimivat vain ylimääräisinä pilssiämpäreinä.