Hajóstabilizátorok és stabilizáló rendszerek
a tengeren lévő hajóknak hat szabadságfokuk van, azaz
1. Tekercs, 2. Húzás, 3. Dobás, 4. Ásítás, 5. Sway, 6. Túlfeszültség.
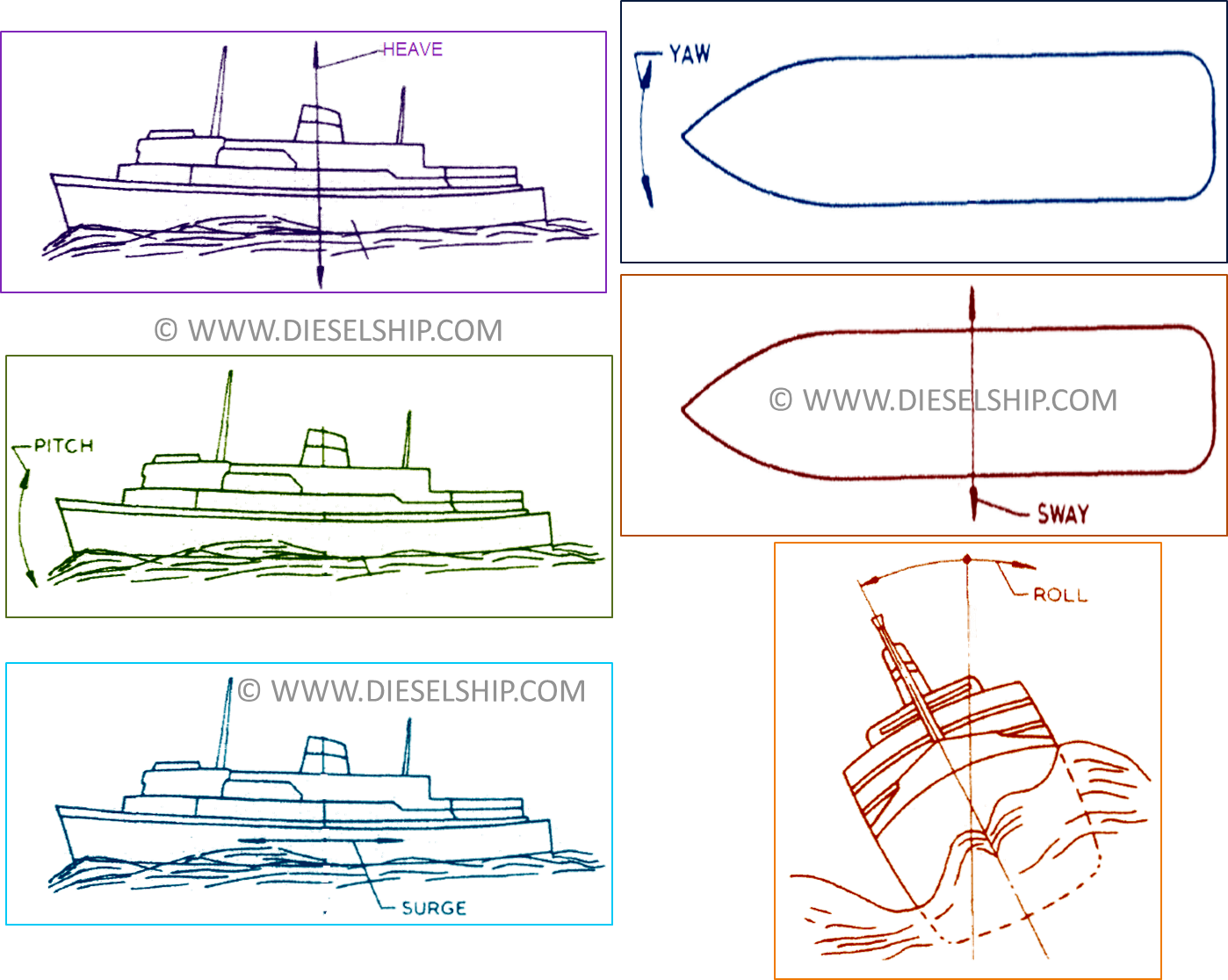
– mindezen mozgások közül a gyakorlatban csak a gördülő mozgást lehet hatékonyan csökkenteni fenékvízkulcsok, gördülésgátló tartályok vagy stabilizátorok felszerelésével.
– stabilizáló rendszer van felszerelve a hajóra a gördülő mozgás csökkentése érdekében. Ezt úgy érik el, hogy ellentétes erőt biztosítanak a hajó gördítésére irányuló mozgással.
- a fin stabilizátorok
- Tartály stabilizáló rendszer.
Fin stabilizátorok
alapvető működés:
próbálta már ezt, miközben autóban utazik??
nyissa ki az ablakpajzsot, és tegye ki az összes figuráját együtt, előre nézve, tenyérrel az út felé, miközben az autó bizonyos sebességgel előre mozog, és győződjön meg róla, hogy az ujjai egyenesek.
ebben a helyzetben a kezed egyenes marad, és nem fogsz semmilyen erővel szembenézni az ujjaid felett vagy alatt.
1. Most kissé emelje fel az ujjait felfelé, és látni fogja, hogy van egy lift az ujjai alatt, és a keze hajlamos lesz felfelé menni.
2. Most tegye az összes ujját lefelé látni fogja, hogy van egy emelő toló erő a keze tetején, és a keze hajlamos lesz lefelé menni ezt’ push ‘- nak vagy’Downward lift’ – nek hívják
3. Most lassítsa le az autót, és csökkentse a sebességet, és ismételje meg a fenti lépéseket látni fogja, hogy a felvonó és a nyomóerő jelentősen csökken, ami azt jelenti, hogy a húzási sebesség fontosabb a jó emeléshez vagy nyomáshoz.
a fenti technika egyszerűen megmagyarázza a hajókon használt aero fólia vagy szárnyashajó uszonyok húzásának, pozitív emelésének és negatív emelésének alapjait.
Uszonystabilizátorok
– az uszonyok stabilizáló erejét a tengeren keresztül történő mozgásuk (húzóerő) és az’ aerofoil ‘vagy a szárnyashajó alakja feletti és alatti vízáramlás hozza létre.
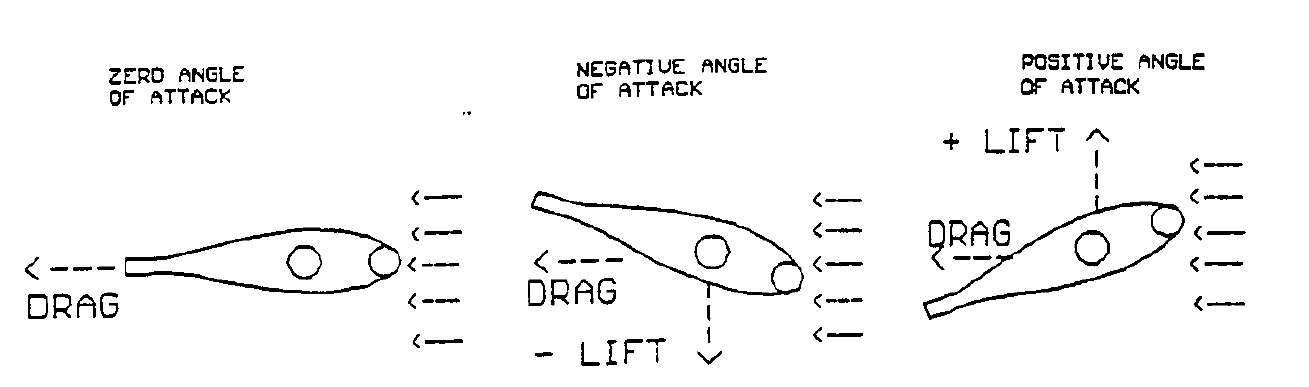
nulla támadási szög:
– ha a hajó nem mozog gördülési szögben, az uszonyok 0o szögben maradnak, és a fenti ábrán látható módon nincs emelő-vagy tolóerő.
negatív & pozitív támadási szög:
– amint a hajó gördülni kezd, amelyet az érzékelők érzékelnek, például mondjuk, hogy a hajó stabil állapotból a kikötő oldalára gördül, a kikötő uszonya felfelé billen (negatív támadási szög), amely negatív emelést tapasztal, azaz az uszony alulról vagy alulról történő emelést tapasztal. Ez az erő felemeli a hajó bal oldalát, hogy megszüntesse a gördülő mozgást a bal oldalra, ugyanakkor a jobb oldali uszony le van döntve (pozitív támadási szög), ezért a hajó húzást tapasztal a jobb oldali oldal felé.
– most a hajó hajlamos a jobb oldalra gurulni, és a fenti műveletet egyszerűen megfordítják, hogy a jobb oldalon lökést, a bal oldalon pedig húzást kínáljanak.
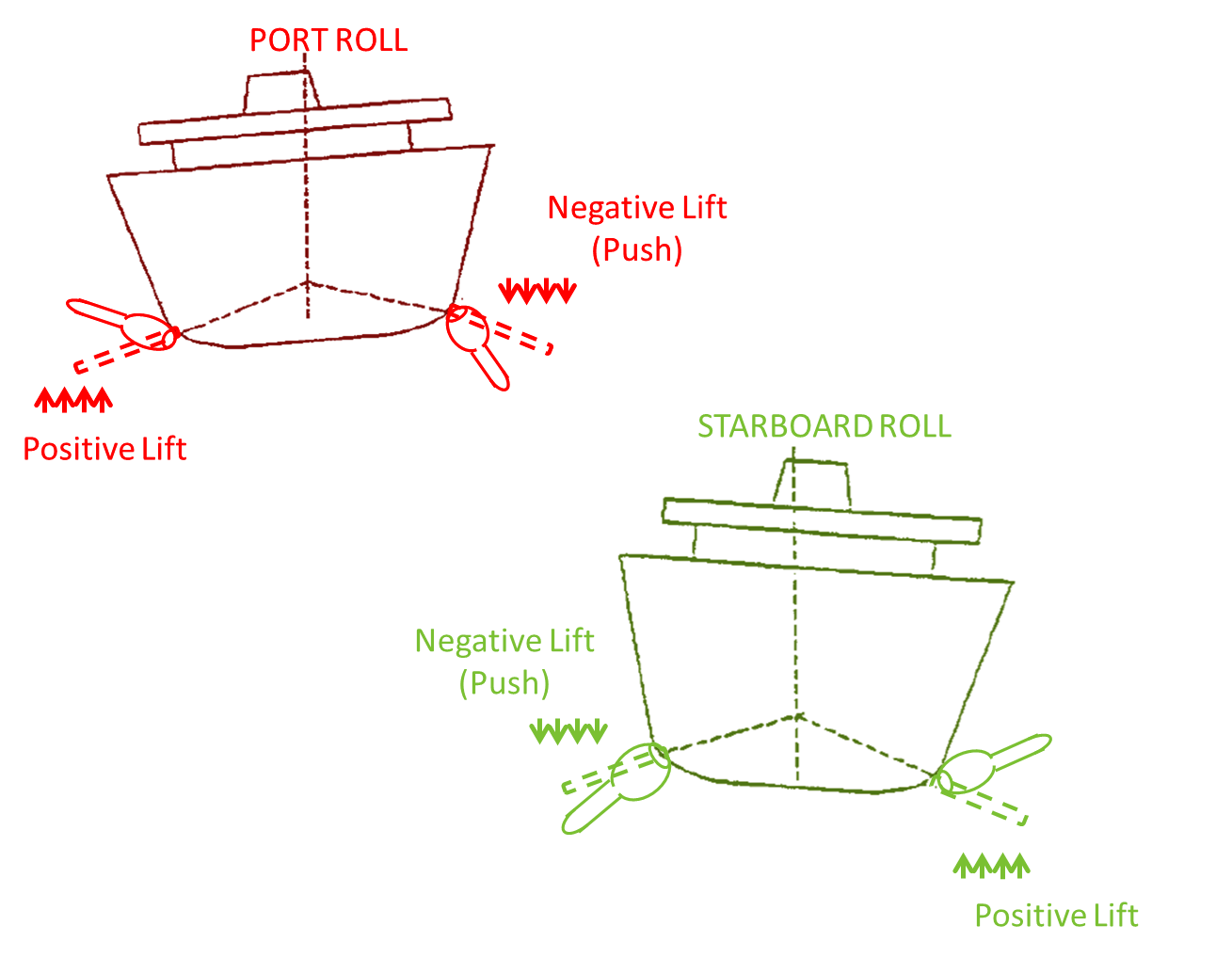
– amikor az uszony elülső széle fel van döntve, a profil tetején átáramló víz a nyomásesés miatt emelést eredményez, míg az alsó rész mentén az emelési nyomást az áramlás biztosítja. Az uszony elülső szélének lefelé történő dőlése megfordítja a hatást, így az alsó részen nyomásesés következik be, a tetején pedig megnövekedett nyomás, hogy lefelé irányuló erőt adjon.
– a hajó ésszerű előrehaladási sebessége (húzása) nélkül az uszonyok hatástalanok. Így ezek a fajta aktív uszony stabilizátorok vannak felszerelve a gyorsabb típusú hajók, működő talán tizenöt vagy több csomó.
uszonyok típusa
– a szárnyashajó-szakasz lehet teljesen mozgatható, szárnyakkal vagy anélkül, vagy részben rögzített, részben mozgatható, ezeket az uszonyokat általában hidraulikusan döntik, fázisban a hengerrel hosszú hullámperiódusokon, 90 db-ot fázison kívül rezonancián és fázisban tekercsgyorsítással rövid időszakokban.
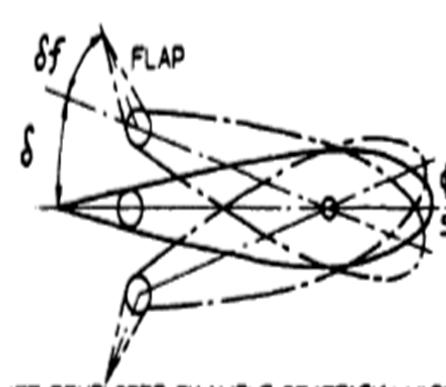
uszonyok teljes mozgatható felülettel
 uszonyok teljes mozgatható felülettel, kiegészítő farokfedéllel
uszonyok teljes mozgatható felülettel, kiegészítő farokfedéllel
rögzített szerkezetű uszonyok
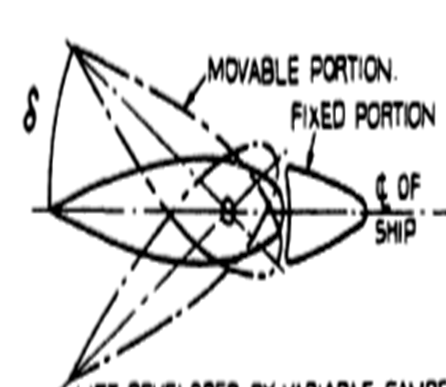
– a nem behúzható uszonyokat általában ott használják, ahol a hajótesten belül korlátozott a hely. Ezeket általában a fenékvíz fordulóján szerelik fel, és nem nyúlnak ki a hajó oldaláról a függőleges vonal fölé vagy a hajó fenekének vízszintes vonala alá, hogy minimalizálják a rakpart falával vagy a dokk fenekével való érintkezés kockázatát.
– az uszony tengelye, amelyhez az uszony mereven van rögzítve, a hajótesthez hegesztett vagy csavarozott szerelőlemezen lévő tengeri tömszelencén halad át, és két jelentős csapágy támasztja alá, az uszony tengelyének belső végéhez kulcsos Kettős végű Kart elektromos meghajtású, változtatható adagolószivattyúból táplált hidraulikus kosokkal működtetik.
hogyan szabályozható az uszony mozgása?
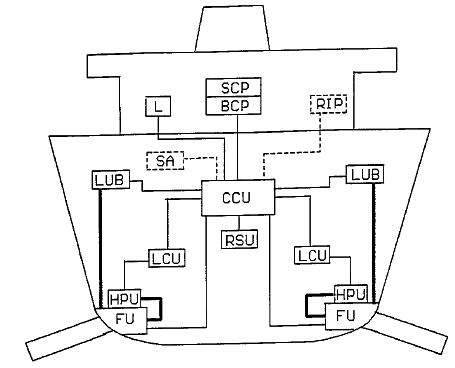
vastagabb vonalak = hidraulikus vonalak; vékonyabb vonalak = elektromos vezetékek
SCP = SOLAS Vezérlőpult, BCP = híd Vezérlőpult, L = Hajónapló, RIP = távjelző Panel, SA = hajó automatizálása, LUB = Kenőolajtartály, CCU = központi vezérlőegység, RSU = Tekercsérzékelő egység, LCU = helyi vezérlőegység, HPU = Hidraulikus tápegység, FU = Fin egység.
– az uszonymozgás vezérlése automatikus, és általában giroszkópos érzékelőberendezésből származik, amely legegyszerűbb formájában — sebességszabályozás – egy kicsi, elektromosan hajtott giroszkópon alapul, amely vízszintesen van felszerelve a tengelyével.
– a hajó tekercsének szögsebessége miatt a giroszkóp a sebességgel arányos mértékben feldolgozza a központosító rugókat, és kis erőt generál, amelyet hidraulikusan erősít egy hidraulikus reléegység, hogy elegendő energiát biztosítson a változtatható adagolószivattyú vezérléseinek megfelelő kapcsolaton keresztül történő működtetéséhez.
– a kötés egy része az uszonytengelyhez kapcsolódik, hogy megszakító jelet továbbítson a szivattyúvezérlőnek, és hogy az uszony az érzékelő egység által megkövetelt dőlésszögben nyugalomba kerüljön.
– a hajók ritkán gurulnak tisztán rezonáns módban; a tengeri állapot gyakran nagyon zavaros. Bonyolultabb és drágább vezérlőrendszerekre van szükség a hirtelen alkalmazott tekercs kezeléséhez, a rezonanciától eltérő időszakokban történő gördüléshez és a több hullámfrekvencia kombinációjából eredő körülmények között történő gördüléshez.
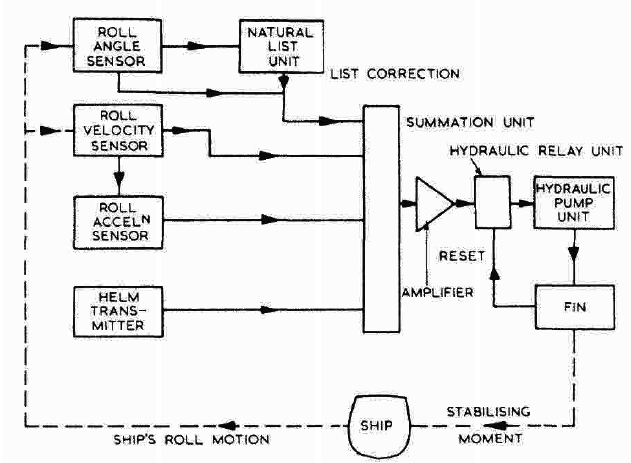
– a függőleges tartású giroszkópon és a differenciáló és összegző egységekbe kapcsolt sebesség-giroszkópon alapuló érzékelő egység lehetővé teszi az uszony mozgásának vezérlését a tekercsszögből, a tekercssebességből és a tekercsgyorsulásból származó összetett funkcióval. Egy ‘természetes lista’ egység hozzáadásával stabilizálódik a tekercs középpontja, és így csökkenti mind a meghajtást, mind a stabilizáló energiaigényt. Ezt kompenzált vezérlőrendszernek nevezik, és általában nagy létesítményekben használják.
RSU-Roll érzékelő egység részletesen (kompenzált vezérlőrendszer)
 – a tekercs 90% – ot meghaladó csökkenése, jellemzően 30 ft out-to-out kevesebb, mint 3 ft out-out csökken, rezonancián érhető el, és az alacsony maradék tekercsek széles frekvenciatartományban tarthatók fenn. Mivel azonban a stabilizáló teljesítmény a hajó sebességének négyzeteként változik, az uszonyok a legkevésbé hatékonyak alacsony vagy nulla sebességnél, ahol csak kiegészítő fenékgerincként működnek.
– a tekercs 90% – ot meghaladó csökkenése, jellemzően 30 ft out-to-out kevesebb, mint 3 ft out-out csökken, rezonancián érhető el, és az alacsony maradék tekercsek széles frekvenciatartományban tarthatók fenn. Mivel azonban a stabilizáló teljesítmény a hajó sebességének négyzeteként változik, az uszonyok a legkevésbé hatékonyak alacsony vagy nulla sebességnél, ahol csak kiegészítő fenékgerincként működnek.