ARTIGO
Pete Millett

Obter recursos valiosos direto para sua caixa de entrada, enviado de uma vez por mês
valorizamos a sua privacidade
Introdução
Muitas aplicações de controle de movimento utilização de imã permanente, os motores CC. Como é mais fácil implementar sistemas de controle usando motores CC em comparação com motores CA, eles são freqüentemente usados quando a velocidade, o torque ou a posição precisam ser controlados.
existem dois tipos de motores CC comumente usados: motores escovados e motores sem escova (ou motores BLDC). Como seus nomes implicam, os motores escovados DC têm escovas, que são usadas para comutar o motor para fazer com que ele gire. Motores sem escova substituem a função de comutação mecânica por controle eletrônico.
em muitas aplicações, um motor DC escovado ou sem escova pode ser usado. Eles funcionam com base nos mesmos princípios de atração e repulsão entre bobinas e ímãs permanentes. Ambos têm vantagens e desvantagens que podem fazer com que você escolha um sobre o outro, dependendo dos requisitos do seu aplicativo.
motores escovados CC
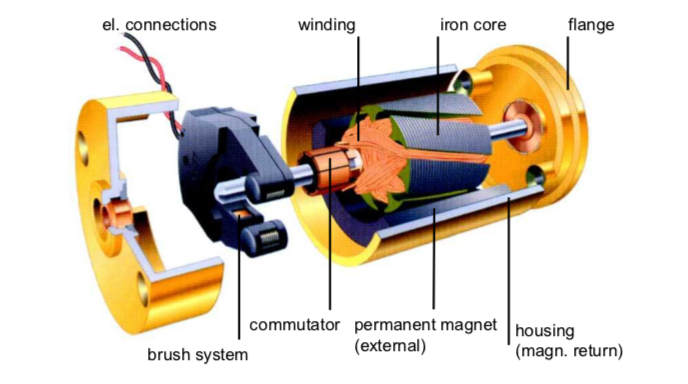
motores escovados CC (imagem do grupo maxon)
os motores CC usam bobinas enroladas de arame para criar um campo magnético. Em um motor escovado, essas bobinas são livres para girar para acionar um eixo-elas são a parte do motor que é chamada de “rotor”. Normalmente, as bobinas são enroladas em torno de um núcleo de ferro, embora também existam motores escovados que são “sem núcleo”, onde o enrolamento é auto-suportado.
a parte fixa do motor é chamada de “estator”. Ímãs permanentes são usados para fornecer um campo magnético estacionário. Normalmente, esses ímãs são posicionados na superfície interna do estator, fora do rotor.
para criar o torque que faz o rotor girar, o campo magnético do rotor precisa girar continuamente, de modo que o campo atrai e repele o fixo campo do estator. Para fazer o campo girar, um interruptor elétrico deslizante é usado. O interruptor consiste no Comutador, que é tipicamente um contato segmentado montado no rotor, e escovas fixas que são montadas no estator.
à medida que o rotor gira, diferentes conjuntos de enrolamentos do rotor são constantemente ligados e desligados pelo comutador. Isso faz com que as bobinas do rotor sejam constantemente atraídas e repelidas dos ímãs fixos do estator, o que faz com que o rotor gire.
como há algum atrito mecânico entre as escovas e o comutador – e como é um contato elétrico, geralmente não pode ser lubrificado – há desgaste mecânico das escovas e do comutador ao longo da vida útil do motor. Esse desgaste acabará chegando a um ponto em que o motor não funciona mais. Muitos motores escovados-especialmente os grandes-têm escovas substituíveis, normalmente feitas de carbono, que são projetadas para manter um bom contato como o desgaste. Esses motores requerem manutenção periódica. Mesmo com escovas substituíveis, eventualmente o comutador também se desgasta a ponto de o motor ser substituído.
para acionar um motor escovado, a tensão CC é aplicada nas escovas, que passa a corrente pelos enrolamentos do rotor para fazer o motor girar.
nos casos em que a rotação é necessária apenas em uma direção e a velocidade ou o torque não precisam ser controlados, nenhuma eletrônica de acionamento é necessária para um motor escovado. Em aplicações como esta, a tensão CC é simplesmente ligada e desligada para fazer o motor funcionar ou parar. Isso é típico em aplicações de baixo custo, como brinquedos motorizados. Se a reversão é necessária, pode ser realizada usando um interruptor de pólo duplo.
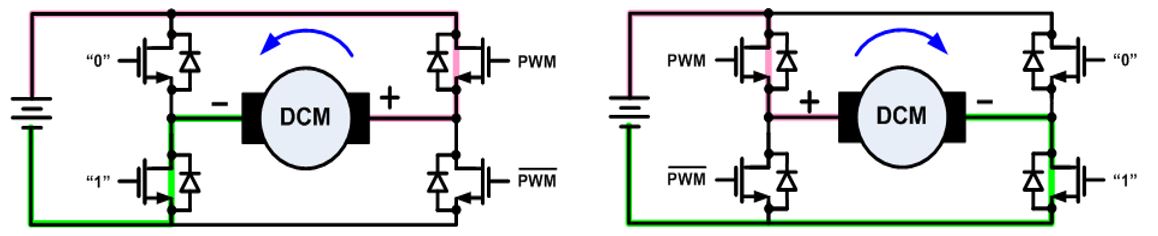
para facilitar o controle de velocidade, torque e direção, uma “ponte H” composta por interruptores eletrônicos-transistores, IGBTs ou MOSFETs – é usada para permitir que o motor seja acionado em qualquer direção. Isso permite que a tensão seja aplicada ao motor em qualquer polaridade, o que faz com que o motor gire em direções opostas. A velocidade ou o torque do motor podem ser controlados pela largura de pulso que modula um dos interruptores.
Brushless DC Motors
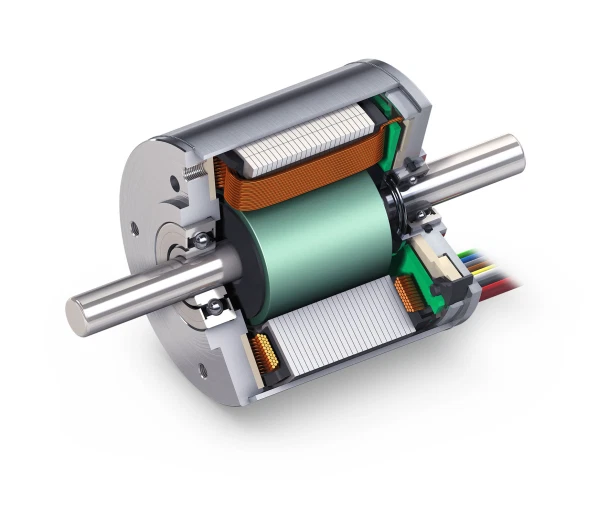
Brushless DC Motors (imagem por maxon grupo)
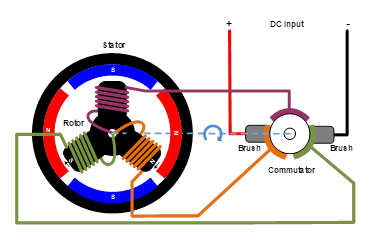
Brushless DC motors operam sobre o mesmo princípio da magnéticos de atração e de repulsão, como escova de motores, mas eles são construídos de forma um pouco diferente. Em vez de um comutador mecânico e escovas, o campo magnético do estator é girado usando comutação eletrônica. Isso requer o uso de eletrônicos de controle ativo.
em um motor sem escova, o rotor tem ímãs permanentes afixados a ele e o estator tem enrolamentos. Os motores sem escova podem ser construídos com o rotor no interior, como mostrado acima, ou com o rotor do lado de fora dos enrolamentos (às vezes chamado de motor “outrunner”).
o número de enrolamentos usados em um motor sem escova é chamado de número de fases. Embora os motores sem escova possam ser construídos com diferentes números de fases, os motores sem escova trifásicos são os mais comuns. Uma exceção são os pequenos ventiladores de refrigeração que podem usar apenas uma ou duas fases.
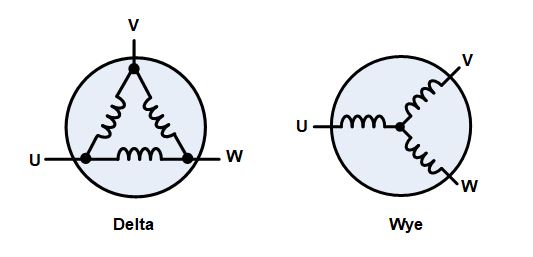
os três enrolamentos de um motor sem escova são conectados em uma configuração” estrela” ou “delta”. Em ambos os casos, existem três fios conectando-se ao motor, e a técnica de acionamento e a forma de onda são idênticas.
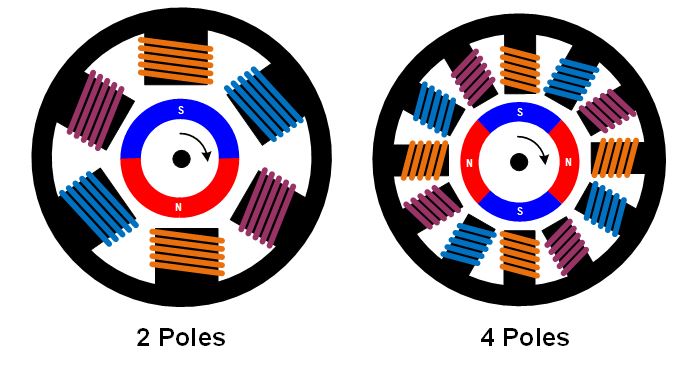
com três fases, os motores podem ser construídos com configurações magnéticas diferentes, chamadas polos. Os motores trifásicos mais simples têm dois pólos: o rotor tem apenas um par de pólos magnéticos, um norte e Um Sul. Os motores também podem ser construídos com mais pólos, o que requer mais seções magnéticas no rotor e mais enrolamentos no estator. As contagens de pólos mais altas podem fornecer maior desempenho, embora velocidades muito altas sejam melhor realizadas com contagens de pólos mais baixas.
para acionar um motor sem escova trifásico, cada uma das três fases precisa ser acionada para a tensão de alimentação de entrada ou para o solo. Para fazer isso, três circuitos de acionamento de “meia ponte” são usados, cada um consistindo em dois interruptores. Os interruptores podem ser transistores bipolares, IGBTs ou MOSFETs, dependendo da tensão e da corrente necessárias.
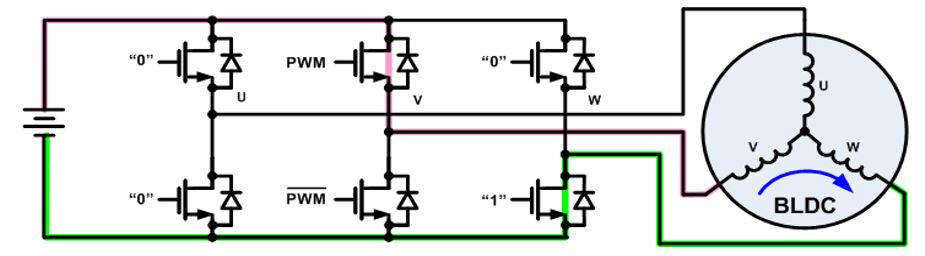
existem várias técnicas de acionamento que podem ser empregadas para motores sem escovas trifásicos. O mais simples é chamado de comutação trapezoidal, bloco ou 120 graus. A comutação Trapezoidal é um pouco semelhante ao método de comutação usado em um motor de escova CC. Neste esquema, a qualquer momento, uma das três fases é conectada ao solo, uma é deixada aberta e a outra é acionada para a tensão de alimentação. Se o controle da velocidade ou do torque é necessário, geralmente a fase conectada à fonte é largura de pulso modulada. Como as fases são comutadas abruptamente em cada ponto de comutação, enquanto a rotação do rotor é constante, há alguma variação de torque (chamada ondulação de torque) à medida que o motor gira.
para maior desempenho, outros métodos de comutação podem ser usados. Seno, ou 180 graus, a comutação conduz a corrente completa todas as três fases do motor o tempo todo. A eletrônica de acionamento gera uma corrente sinusoidal em cada fase, cada uma deslocada 120 graus da outra. Esta técnica da movimentação minimiza a ondinha do torque, assim como o ruído acústico e a vibração, e é usada frequentemente para movimentações do elevado desempenho ou da eficiência elevada.
para girar corretamente o campo, a eletrônica de controle precisa saber a posição física dos ímãs no rotor em relação ao estator. Muitas vezes, as informações de posição são obtidas usando sensores Hall montados no estator. À medida que o rotor magnético gira, os sensores Hall captam o campo magnético do rotor. Esta informação é usada pela eletrônica da movimentação para passar a corrente através dos enrolamentos do estator em uma sequência que faça com que o rotor gire.
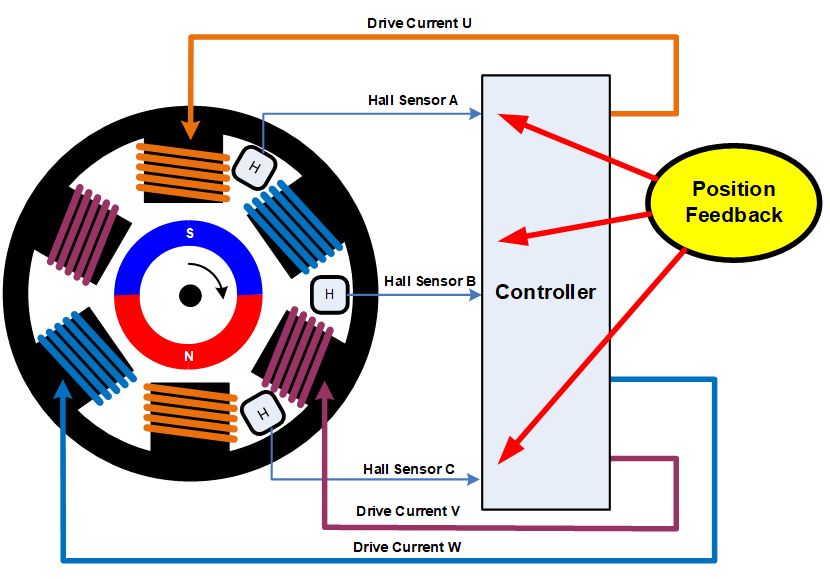
usando três sensores Hall, A comutação trapezoidal pode ser implementada com lógica combinacional simples, portanto, nenhuma eletrônica de controle sofisticada é necessária. Outros métodos de comutação, como comutação senoidal, exigem um pouco mais sofisticado eletrônica de controle e geralmente empregam um microcontrolador.
além de fornecer feedback de posição usando sensores Hall, existem vários métodos que podem ser usados para determinar a posição do rotor sem sensores. O mais simples é monitorar o EMF traseiro em uma fase não programada para detectar o campo magnético em relação ao estator. Um algoritmo de controle mais sofisticado, chamado Controle orientado a campo ou FOC, calcula a posição com base nas correntes do rotor e outros parâmetros. FOC normalmente requer um processador bastante poderoso, pois há muitos cálculos que precisam ser realizados muito rapidamente. Isso, é claro, é mais caro do que um simples método de controle trapezoidal.
motores escovados e sem escovas: vantagens e desvantagens
dependendo da sua aplicação, existem razões pelas quais você pode optar por usar um motor sem escova sobre um motor escovado. A tabela a seguir resume as principais vantagens e desvantagens de cada tipo de motor:
| Escovado motor | o motor sem Escova | |
| Vida | Curta (escovas se desgastam) | Long (sem escovas para vestir) |
| Velocidade e Aceleração | Médio | Alta |
| Eficiência | Médio | Alta |
| o Ruído Elétrico | Ruidosa (bush arco) | Quiet |
| Ruído Acústico & Torque Ripple | Pobre | Médio (trapezoidal) ou boa (sine) |
| Custo | Menor | Médio (adicionado eletrônica) |
Vida
Como mencionado anteriormente, uma das desvantagens do escovada viaja de automóvel é a de que não é mecânico de desgaste das escovas e comutador. As escovas de carbono, em particular, são sacrificiais e, em muitos motores, são projetadas para serem substituídas periodicamente como parte de um programa de manutenção. O cobre macio do comutador também é lentamente desgastado pelas escovas e, eventualmente, chega a um ponto em que o motor não funcionará mais. Como os motores sem escova não têm contatos móveis, eles não sofrem com esse desgaste.
velocidade e aceleração
motores escovados a velocidade de rotação pode ser limitada pelas escovas e comutador, bem como a massa do rotor. Em velocidades muito altas, o contato escova para comutador pode se tornar errático e o arco da escova aumenta. A maioria dos motores escovados também usa um núcleo de ferro laminado no rotor, o que lhes confere grande inércia rotacional. Isso limita as taxas de aceleração e desaceleração do motor. É possível construir um motor sem escova com ímãs de terras raras muito poderosos no rotor, o que minimiza a inércia rotacional. Claro, isso aumenta o custo.
ruído elétrico
as escovas e o comutador formam uma espécie de interruptor elétrico. À medida que o motor gira, os interruptores estão sendo abertos e fechados, enquanto uma corrente significativa está fluindo através dos enrolamentos do rotor, que são indutivos. Isso resulta em arco nos contatos. Isso gera uma grande quantidade de ruído elétrico, que pode ser acoplado em circuitos sensíveis. O arco pode ser um pouco mitigado adicionando capacitores ou snubbers RC nas escovas, mas a comutação instantânea do comutador sempre gera algum ruído elétrico.
Ruído Acústico
os motores escovados são “Hard switched” – ou seja, a corrente é abruptamente movida de um enrolamento para outro. O torque gerado varia ao longo da rotação do rotor à medida que os enrolamentos são ligados e desligados. Com um motor sem escova, é possível controlar as correntes de enrolamento de uma forma que gradualmente transita a corrente de um enrolamento para outro. Isso reduz a ondulação do torque, que é uma pulsação mecânica de energia no rotor. A ondulação de Torque causa vibração e ruído mecânico, especialmente em baixas velocidades do rotor.
custo
como os motores sem escova exigem eletrônicos mais sofisticados, o custo geral de uma unidade sem escova é maior do que o de um motor de escova. Mesmo que um motor sem escova seja mais simples de fabricar do que um motor escovado, uma vez que não possui escovas e um comutador, a tecnologia do motor escovado é muito madura e os custos de fabricação são baixos. Isso está mudando à medida que os motores sem escova se tornam mais populares, especialmente em aplicações de alto volume, como motores automotivos. Além disso, o custo da eletrônica, como os microcontroladores, continua a diminuir, tornando os motores sem escova mais atraentes.
resumo
devido ao declínio dos custos e ao melhor desempenho, os motores sem escova estão ganhando popularidade em muitas aplicações. Mas ainda há lugares onde os motores escovados fazem mais sentido.
muito pode ser aprendido olhando para a adoção de motores sem escova em automóveis. A partir de 2020, a maioria dos motores que estão funcionando sempre que o carro está funcionando – coisas como bombas e ventiladores – passaram de motores escovados para motores sem escova por sua maior confiabilidade. O custo adicional do motor e da eletrônica mais do que compensa a menor taxa de falhas de campo e a diminuição dos Requisitos de manutenção.
por outro lado, os motores que são operados com pouca frequência – por exemplo, motores que movem bancos de energia e vidros elétricos – permaneceram predominantemente motores de escova. O raciocínio é que o tempo total de execução ao longo da vida útil do carro é muito pequeno, e é muito improvável que os motores falhem ao longo da vida útil do carro.Como o custo dos motores sem escova e sua eletrônica associada continua a diminuir, os motores sem escova estão encontrando seu caminho em aplicações que tradicionalmente são mantidas por motores escovados. Como um outro exemplo do mundo automotivo, os motores do ajuste do assento no cartão da parte alta têm adotado motores sem escova porque geram menos ruído acústico.
obtenha suporte técnico