Navio de Estabilizadores e estabilização de sistemas
Um navio no mar tem seis graus de liberdade, isto é,
1. Rolo, 2. Heave, 3. Pitch, 4. Guinada, 5. Balança, 6. Surto.
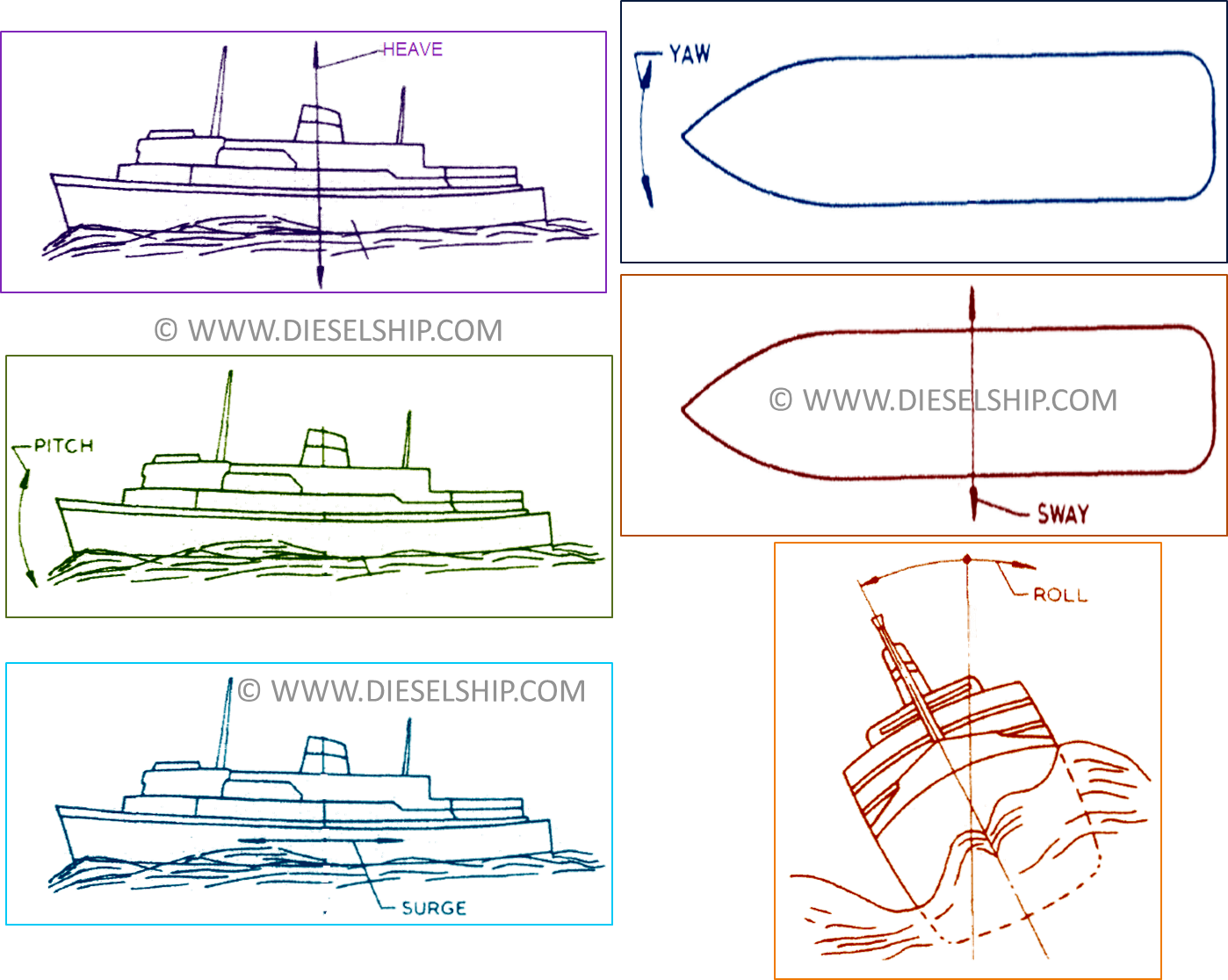
– de todos esses movimentos, apenas o movimento de rolamento pode efetivamente ser reduzido na prática, encaixando quilhas de Porão, tanques anti-rolamento ou Estabilizadores.
– existem dois sistemas básicos de estabilização usados em navios;
- os estabilizadores da aleta
- sistema de estabilização do tanque.
estabilizadores de barbatanas
operação básica:
você já tentou isso enquanto viaja de carro??
abra o escudo da janela e coloque todas as suas figuras juntas voltadas para a frente com a palma da mão voltada para a estrada enquanto o carro está em movimento para a frente a alguma velocidade e certifique-se de que seus dedos estão retos.
nesta condição, sua mão ficará reta e você não enfrentará nenhuma força acima ou abaixo de seus dedos, isso é simplesmente chamado de ‘arrastar’.
1. Agora levante ligeiramente os dedos para cima e você verá que há um elevador sob os dedos e sua mão tenderá a subir isso chamado de ‘elevador’.
2. Agora, coloque todos os dedos para baixo, você verá que há uma força de impulso de Elevação em cima da mão e sua mão tenderá a descer, isso é chamado de ‘empurrar’ ou ‘levantar para baixo’
3. Agora desacelere o carro e reduza a velocidade e repita as etapas acima, você verá que a força de Elevação e empurrão é consideravelmente reduzida, o que significa que a velocidade de arrasto é mais importante para ter um bom elevador ou um empurrão.
a técnica acima simplesmente explica o básico de arrasto, elevação positiva e elevação negativa de uma folha aero ou barbatanas de hidrofólio que são usadas em navios.
estabilizadores de barbatanas
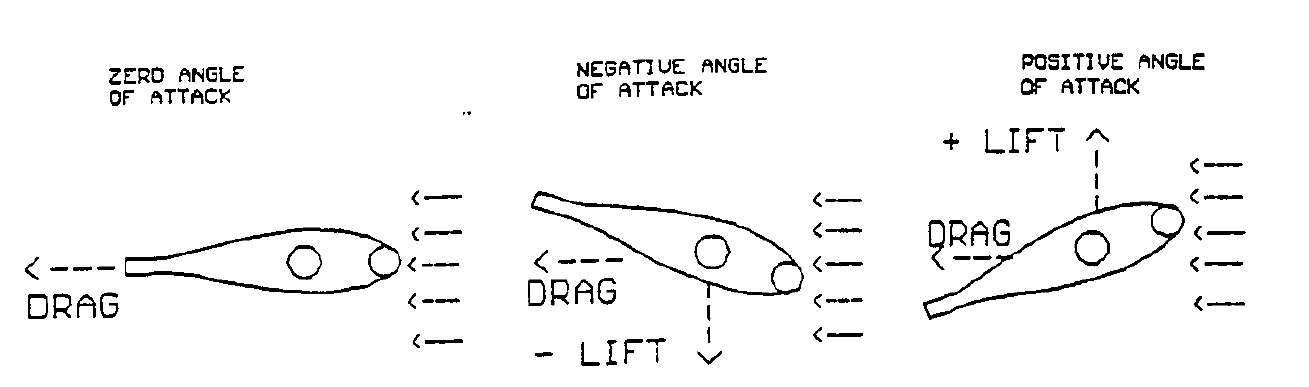
Zero Ângulo de Ataque:
– Quando não há qualquer movimento de rolamento do navio as barbatanas ficar em ângulo de 0o e não há Elevador ou Empurrar a força oferecida para as barbatanas, como mostrado na figura acima.
negativo & ângulo de ataque positivo:
– assim que o navio começa a rolar, que é detectado pelos sensores, por exemplo, digamos que o navio rola de condição estável para o lado da porta, a barbatana da porta é inclinada para cima (ângulo de ataque negativo) que experimentam elevação negativa, ou seja, a barbatana experimenta uma elevação de baixo ou um empurrão de baixo. Esta força levanta o lado do porto do navio para cancelar o movimento de rolamento para o lado do porto e, ao mesmo tempo, a barbatana de estibordo é inclinada para baixo (ângulo positivo de ataque) e, portanto, o navio experimenta um puxão em direção ao lado de estibordo.
– agora, o navio tende a rolar para o lado estibordo e a ação acima é simplesmente invertida para oferecer um empurrão no lado estibordo e um puxão no lado da porta.
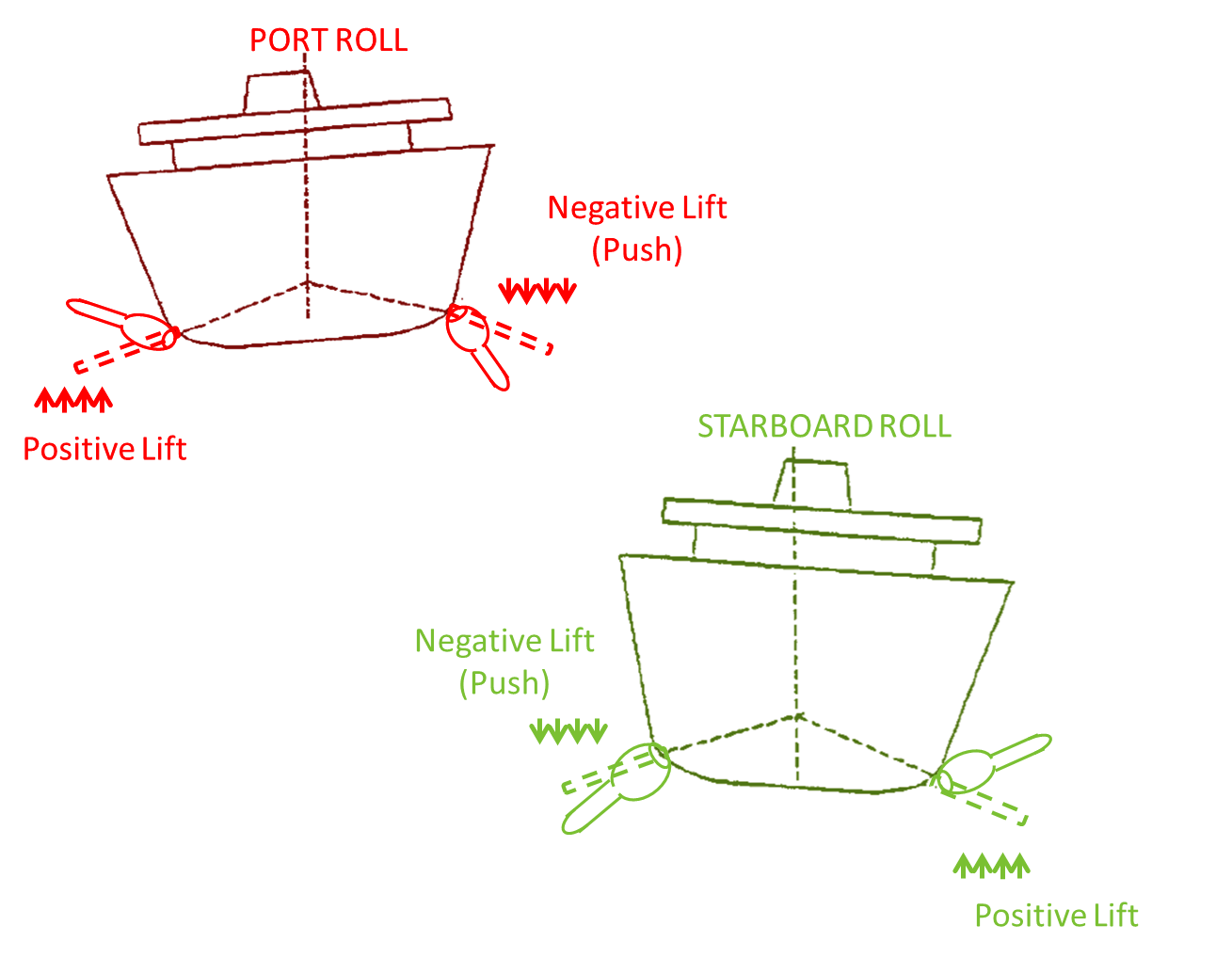
– Quando a borda anterior da barbatana é inclinado para cima, o fluxo de água na parte superior do perfil produz elevador devido a uma queda na pressão, enquanto a elevação de pressão é fornecido pelo fluxo ao longo da parte inferior. Inclinação para baixo da borda dianteira da barbatana, inverte o efeito, de modo que ocorre uma queda na pressão na parte inferior e aumento da pressão na parte superior para dar uma força descendente.
– sem uma taxa razoável de movimento para a frente (arrasto) do navio, as barbatanas são ineficazes. Assim, esses tipos de estabilizadores de barbatanas ativas são instalados nos tipos mais rápidos de navios, operando a talvez quinze ou mais nós.
Tipo de Barbatanas
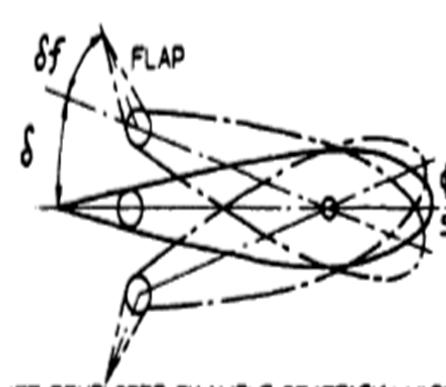
– A hidrodinâmica seção podem ser móveis, com ou sem abas ou parcialmente corrigido, em parte, bens móveis, Estas barbatanas estão inclinadas, geralmente hidraulicamente, em fase com o rolo em longos períodos da onda, 90° fora de fase em ressonância e em fase com rolo de aceleração em curtos períodos.
Nadadeiras com todos os bens móveis superfície
 Barbatanas com todos os bens móveis superfície com adicional de cauda aba
Barbatanas com todos os bens móveis superfície com adicional de cauda aba
Barbatanas com estrutura fixa
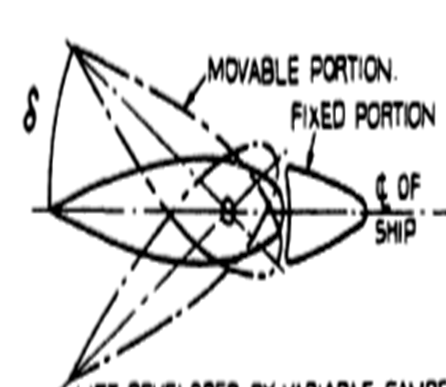
– Não-retrátil barbatanas são comumente utilizados onde o espaço dentro do casco, é limitado. Eles geralmente são instalados na virada do porão e não se projetam além da linha vertical do lado do navio ou abaixo da linha horizontal do fundo do navio, para minimizar o risco de contato com uma parede de cais ou o fundo da doca.
– o eixo da aleta, a que a aleta é unida rigidamente, passa através de uma glândula de mar em uma placa de montagem soldada ou aparafusada à casca e é apoiado por dois rolamentos substanciais, uma alavanca dobro-terminada keyed à extremidade interna do eixo da aleta é atuada por carneiros hidráulicos fornecidos de uma bomba de entrega variável eletricamente conduzida.
como o movimento da barbatana é controlado?
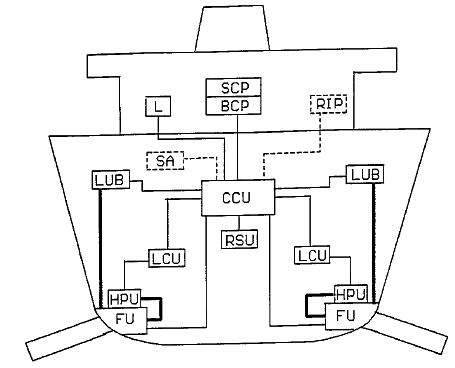
Linhas mais espessas = Linhas Hidráulicas; mais finas Linhas = Linhas Elétricas
SCP = SOLAS painel de Controle, BCP = Ponte Painel de Controle, L = Navio de Registo, o RIP = Indicador Remoto Painel SA = Navio de Automação, o LUB = Óleo Lubrificante Tanque, CCU = Unidade de Controle Central, o RSU = Rolo Unidade de sensor, LCU = Local da unidade de Controle, HPU = Unidade de Potência Hidráulica, FU = Fin Unidade.
– o Controle do movimento da aleta é automático e é derivado geralmente Da Engrenagem de detecção giroscópica que, em seu formulário o mais simples — controle da velocidade – é baseado em um giroscópio pequeno, eletricamente conduzido montado horizontalmente com suas athwartships da linha central.
– A velocidade angular do rolo do navio faz com que o giroscópio para processo contra a centralização de molas para uma quantidade proporcional à velocidade e gera uma pequena força, que é hidraulicamente amplificado por um hidráulica unidade de relé para fornecer energia suficiente para operar os controles da variável bomba de envio via adequada ligação.
– parte da ligação é acoplada ao eixo da aleta para transmitir um sinal de cancelamento ao controle da bomba e para trazer a aleta para descansar no ângulo de inclinação exigido pela unidade de detecção.
– este tipo de controle é frequentemente instalado em pequenas instalações, geralmente por razões econômicas, e é mais eficaz contra o rolamento ressonante.
– os navios raramente rolam em um modo puramente ressonante; o estado do mar é muitas vezes altamente confuso. Sistemas de controle mais elaborados e mais caros são necessários para lidar com o rolo aplicado repentinamente, rolando em períodos fora da ressonância e rolando em condições decorrentes da combinação de várias frequências de ondas.
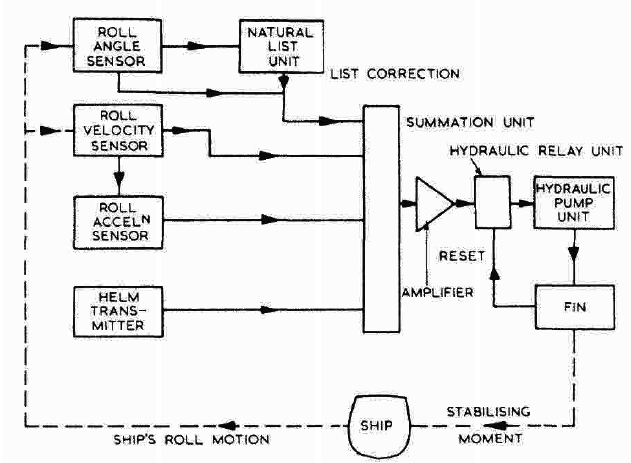
– uma unidade de detecção baseada em um giroscópio de manutenção vertical e um giroscópio de velocidade acoplado em unidades de diferenciação e soma permite que o movimento da aleta seja controlado por uma função composta derivada do ângulo do rolo, Velocidade do rolo e aceleração do rolo. Ao adicionar uma unidade de “lista natural”, a estabilização é alcançada sobre o ponto médio de rolagem e, portanto, reduz a propulsão e a demanda de energia estabilizadora. Isso é conhecido como um sistema de controle compensado e geralmente é usado em grandes instalações.
unidade do Sensor do RSU – rolo em detalhe (sistema de controlo compensado)
 – a redução do rolo no excesso de 90%, Tipicamente 30° out-to-out reduzido a menos do que 3° out-to-out, pode ser conseguida na ressonância e os baixos rolos residuais podem ser mantidos sobre uma vasta gama de frequências. No entanto, como a potência estabilizadora varia conforme o quadrado da velocidade do navio, as aletas são menos eficazes em velocidade baixa ou zero, onde funcionam apenas como quilhas de Porão adicionais.
– a redução do rolo no excesso de 90%, Tipicamente 30° out-to-out reduzido a menos do que 3° out-to-out, pode ser conseguida na ressonância e os baixos rolos residuais podem ser mantidos sobre uma vasta gama de frequências. No entanto, como a potência estabilizadora varia conforme o quadrado da velocidade do navio, as aletas são menos eficazes em velocidade baixa ou zero, onde funcionam apenas como quilhas de Porão adicionais.