articol
Pete Millett

obțineți resurse valoroase direct în căsuța de e – mail-trimise o dată pe lună
vă prețuim confidențialitatea
Introducere
multe aplicații de control al mișcării utilizează motoare de curent continuu cu magnet permanent. Deoarece este mai ușor să implementați sisteme de control folosind motoare de curent continuu în comparație cu motoarele de curent alternativ, acestea sunt adesea utilizate atunci când viteza, cuplul sau poziția trebuie controlate.
există două tipuri de motoare de curent continuu utilizate în mod obișnuit: motoare periate și motoare fără perii (sau motoare BLDC). După cum sugerează și numele lor, motoarele periate DC au perii, care sunt folosite pentru a comuta motorul pentru a-l face să se rotească. Motoarele fără perii înlocuiesc funcția de comutare mecanică cu control electronic.
în multe aplicații, poate fi utilizat un motor DC periat sau fără perii. Ele funcționează pe baza acelorași principii de atracție și repulsie între bobine și magneți permanenți. Ambele au avantaje și dezavantaje care vă pot determina să alegeți unul peste celălalt, în funcție de cerințele aplicației dvs.
motoare periate DC
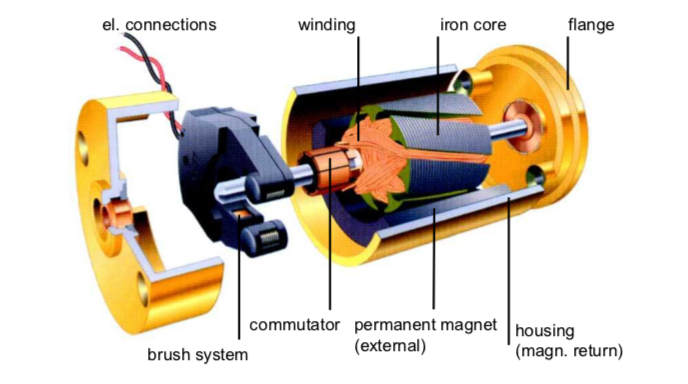
motoare periate DC (imagine de maxon group)
motoarele DC folosesc bobine de sârmă pentru a crea un câmp magnetic. Într – un motor periat, aceste bobine sunt libere să se rotească pentru a conduce un arbore-ele sunt partea motorului numită „rotor”. De obicei, bobinele sunt înfășurate în jurul unui miez de fier, deși există și motoare periate care sunt „fără miez”, unde înfășurarea este auto-susținută.
partea fixă a motorului se numește „stator”. Magneții permanenți sunt utilizați pentru a furniza un câmp magnetic staționar. În mod normal, acești magneți sunt poziționați pe suprafața interioară a statorului, în afara rotorului.
pentru a crea un cuplu, ceea ce face rotorul de spin, câmpul magnetic al rotorului trebuie să se rotească în mod continuu, astfel încât este câmp atrage și respinge câmpul fix al statorului. Pentru a face câmpul să se rotească, se utilizează un comutator electric glisant. Comutatorul constă din comutator, care este de obicei un contact segmentat montat pe rotor și perii fixe care sunt montate pe stator.
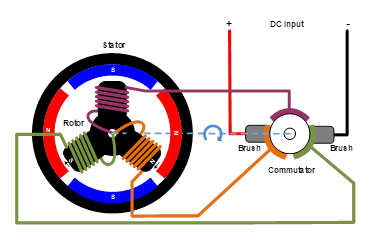
pe măsură ce rotorul se rotește, diferite seturi de înfășurări ale rotorului sunt pornite și oprite constant de către comutator. Acest lucru face ca bobinele rotorului să fie atrase și respinse în mod constant de magneții fixați ai statorului, ceea ce face ca rotorul să se rotească.
deoarece există o frecare mecanică între perii și comutator – și deoarece este un contact electric, în general nu poate fi lubrifiat – există o uzură mecanică a periilor și comutatorului pe durata de viață a motorului. Această uzură va ajunge în cele din urmă la un punct în care motorul nu mai funcționează. Multe motoare periate – în special cele mari-au perii înlocuibile, de obicei din carbon, care sunt concepute pentru a menține un contact bun ca uzură. Aceste motoare necesită întreținere periodică. Chiar și cu perii înlocuibile, în cele din urmă comutatorul se poartă până la punctul în care motorul trebuie înlocuit.
pentru a conduce un motor periat, tensiunea DC este aplicată pe perii, care trece curentul prin înfășurările rotorului pentru a face rotirea motorului.
în cazurile în care rotația este necesară doar într-o singură direcție, iar viteza sau cuplul nu trebuie controlate, nu sunt necesare deloc electronice de acționare pentru un motor periat. În aplicații ca aceasta, tensiunea DC este pur și simplu pornită și oprită pentru a face motorul să funcționeze sau să se oprească. Acest lucru este tipic în aplicațiile cu costuri reduse, cum ar fi jucăriile motorizate. Dacă este necesară inversarea, aceasta poate fi realizată prin utilizarea unui comutator dublu pol.
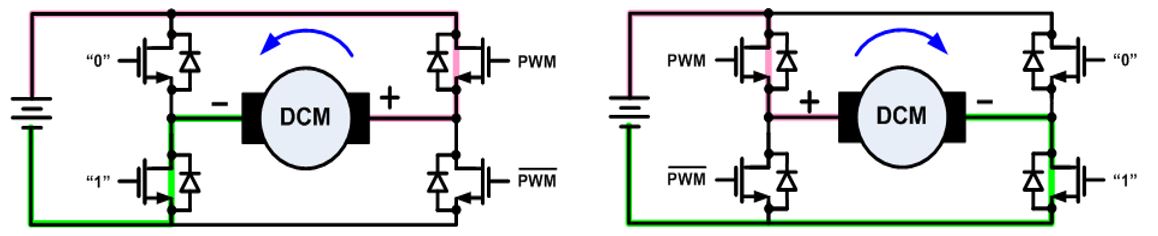
pentru a facilita controlul vitezei, cuplului și direcției, se utilizează o „punte H” compusă din comutatoare electronice-tranzistoare, IGBT sau MOSFET – uri – pentru a permite acționarea motorului în ambele direcții. Acest lucru permite ca tensiunea să fie aplicată motorului în oricare polaritate, ceea ce face ca motorul să se rotească în direcții opuse. Viteza sau cuplul motorului pot fi controlate prin modularea lățimii impulsului unuia dintre Întrerupătoare.
motoare de curent continuu fără perii
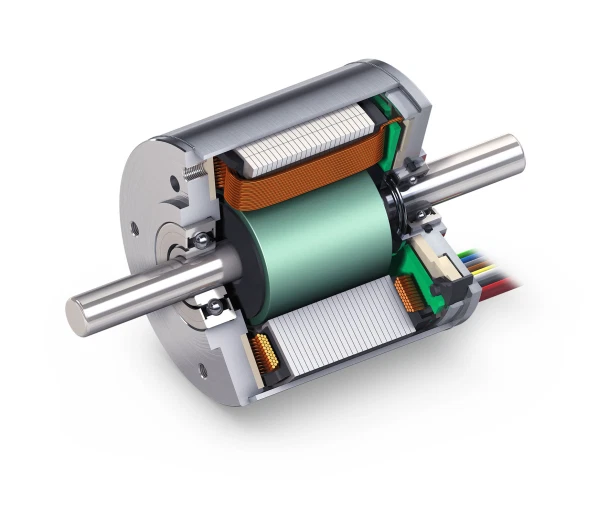
motoare de curent continuu fără perii (imagine de maxon group)
motoare de curent continuu fără perii funcționează pe același principiu de atracție magnetică și repulsie ca motoare de perie, dar ele sunt construite oarecum diferit. În loc de un comutator mecanic și perii, câmpul magnetic al statorului este rotit prin utilizarea comutării electronice. Acest lucru necesită utilizarea electronicii active de control.
într-un motor fără perii, rotorul are magneți permanenți fixați pe el, iar statorul are înfășurări. Motoarele fără perii pot fi construite cu rotorul în interior, așa cum se arată mai sus, sau cu rotorul în exteriorul înfășurărilor (uneori numit motor „outrunner”).
numărul de înfășurări utilizate într-un motor fără perii se numește numărul de faze. Deși motoarele fără perii pot fi construite cu un număr diferit de faze, motoarele trifazate fără perii sunt cele mai frecvente. O excepție sunt ventilatoarele mici de răcire care pot utiliza doar una sau două faze.
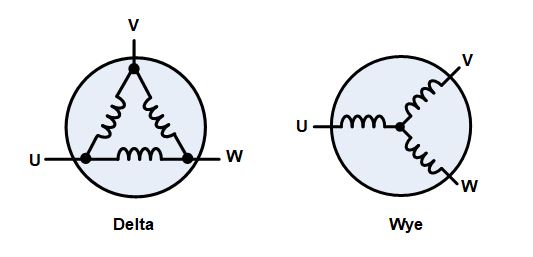
cele trei înfășurări ale unui motor fără perii sunt conectate fie într-o configurație „stea”, fie într-o configurație „delta”. În ambele cazuri, există trei fire care se conectează la motor, iar tehnica de acționare și forma de undă sunt identice.
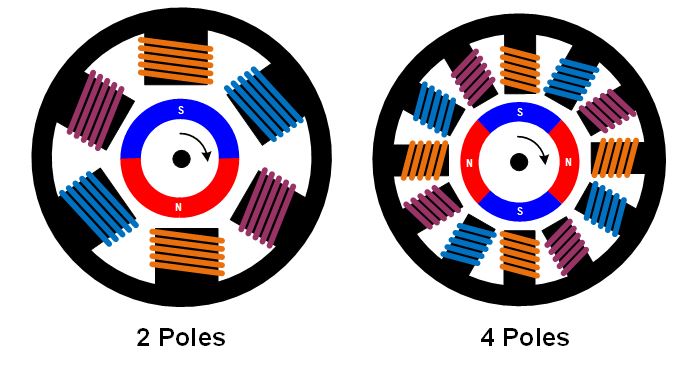
cu trei faze, motoarele pot fi construite cu diferite configurații magnetice, numite poli. Cele mai simple motoare cu 3 faze au doi poli: rotorul are o singură pereche de poli magnetici, unul la nord și unul la sud. Motoarele pot fi, de asemenea, construite cu mai mulți poli, ceea ce necesită mai multe secțiuni magnetice în rotor și mai multe înfășurări în stator. Un număr mai mare de poli poate oferi performanțe mai mari, deși viteze foarte mari sunt mai bine realizate cu un număr mai mic de poli.
pentru a conduce un motor trifazat fără perii, fiecare dintre cele trei faze trebuie să poată fi condusă fie la tensiunea de alimentare de intrare, fie la masă. Pentru a realiza acest lucru, se folosesc trei circuite de acționare „jumătate de pod”, fiecare constând din două comutatoare. Comutatoarele pot fi tranzistoare bipolare, IGBT sau MOSFET, în funcție de tensiunea și curentul necesar.
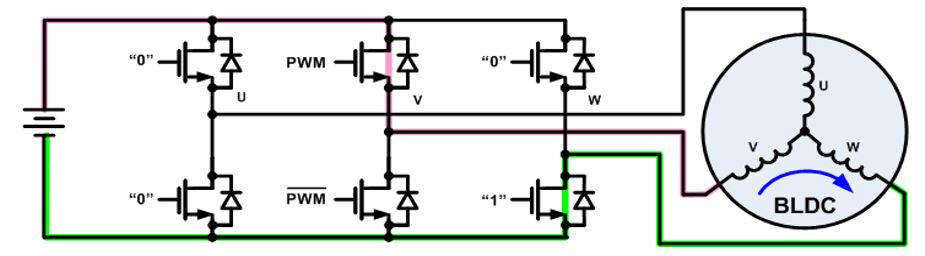
există o serie de tehnici de acționare care pot fi utilizate pentru motoare trifazate fără perii. Cel mai simplu se numește trapezoidal, bloc sau comutație de 120 de grade. Comutarea trapezoidală este oarecum similară cu metoda de comutare utilizată într-un motor cu perie DC. În această schemă, la un moment dat, una dintre cele trei faze este conectată la masă, una este lăsată deschisă, iar cealaltă este condusă la tensiunea de alimentare. Dacă este necesar controlul vitezei sau al cuplului, de obicei faza conectată la alimentare este modulată în lățimea impulsului. Deoarece fazele sunt comutate brusc la fiecare punct de comutare, în timp ce rotația rotorului este constantă, există o anumită variație a cuplului (numită unda cuplului) pe măsură ce motorul se rotește.
pentru performanțe mai mari, pot fi utilizate alte metode de comutare. Sine, sau 180 de grade, comutarea conduce curent aprofundată toate cele trei faze cu motor tot timpul. Electronica de acționare generează un curent sinusoidal, deși fiecare fază, fiecare deplasată la 120 de grade față de cealaltă. Această tehnică de acționare minimizează ondularea cuplului, precum și zgomotul și vibrațiile acustice și este adesea utilizată pentru acționări de înaltă performanță sau eficiență ridicată.
pentru a roti corect câmpul, electronica de control trebuie să cunoască poziția fizică a magneților de pe rotor în raport cu statorul. Adesea, informațiile de poziție sunt obținute folosind senzori Hall care sunt montați pe stator. Pe măsură ce rotorul magnetic se rotește, senzorii Hall ridică câmpul magnetic al rotorului. Aceste informații sunt utilizate de electronica de acționare pentru a trece curentul prin înfășurările statorului într-o secvență care determină rotirea rotorului.
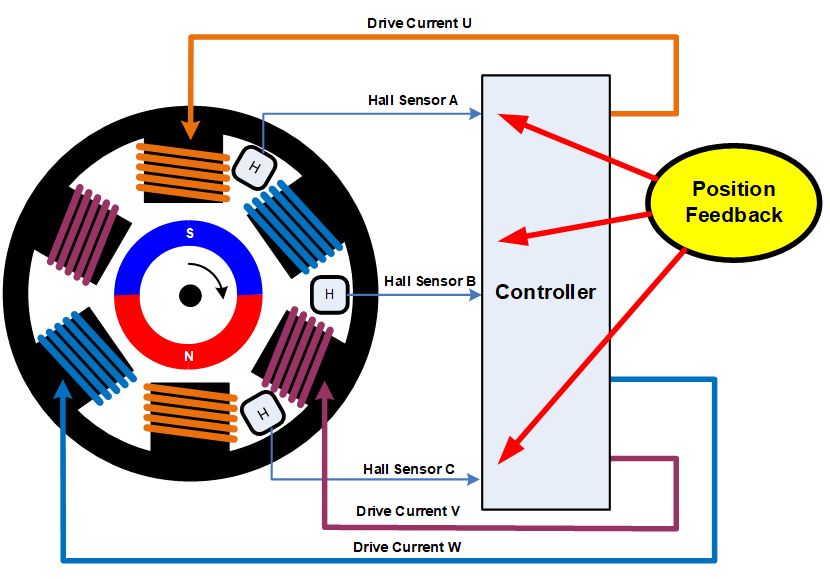
folosind trei senzori Hall, comutarea trapezoidală poate fi implementată cu o logică combinațională simplă, astfel încât nu sunt necesare electronice sofisticate de control. Alte metode de comutare, cum ar fi comutarea sinusoidală, necesită o electronică de control ceva mai sofisticată și folosesc de obicei un microcontroler.
pe lângă furnizarea de feedback de poziție folosind senzori Hall, există diverse metode care pot fi utilizate pentru a determina poziția rotorului fără senzori. Cel mai simplu este să monitorizați EMF-ul din spate pe o fază nedovedită pentru a simți câmpul magnetic relativ la stator. Un algoritm de control mai sofisticat, numit Field Oriented Control sau FOC, calculează poziția pe baza curenților rotorului și a altor parametri. FOC necesită de obicei un procesor destul de puternic, deoarece există multe calcule care trebuie efectuate foarte repede. Aceasta, desigur, este mai costisitoare decât o metodă simplă de control trapezoidal.
motoare periate și fără perii: avantaje și dezavantaje
în funcție de aplicația dvs., există motive pentru care ați putea alege să utilizați un motor fără perii peste un motor periat. Următorul tabel rezumă principalele avantaje și dezavantaje ale fiecărui tip de motor:
| motor periat | motor fără perii | |
| durata de viață | scurt (periile se uzează) | lung (fără perii de purtat) |
| viteza și accelerația | Mediu | mare |
| eficiență | Mediu | ridicat |
| zgomot electric | zgomot (arc de bucșă) | liniște |
| zgomot acustic & unda cuplului | slab | Mediu (trapezoidal) sau bun (sine) |
| Cost | cel mai mic | Mediu (electronică adăugată) |
durata de viață
după cum sa menționat anterior, unul dintre dezavantajele motoarelor periate este că există o uzură mecanică a periilor și a comutatorului. Periile de Carbon, în special, sunt sacrificate, iar în multe motoare sunt proiectate pentru a fi înlocuite periodic ca parte a unui program de întreținere. Cuprul moale al comutatorului este, de asemenea, uzat încet de perii și, în cele din urmă, ajunge la un punct în care motorul nu va mai funcționa. Deoarece motoarele fără perii nu au contacte în mișcare, ele nu suferă de această uzură.
viteza și accelerația
viteza de rotație a motoarelor periate poate fi limitată de perii și comutator, precum și de masa rotorului. La viteze foarte mari, contactul perie-comutator poate deveni neregulat, iar arcul periei crește. Majoritatea motoarelor periate folosesc, de asemenea, un miez de fier laminat în rotor, ceea ce le conferă o inerție de rotație mare. Acest lucru limitează viteza de accelerație și decelerare a motorului. Este posibil să construiți un motor fără perii cu magneți de pământuri rare foarte puternici pe rotor, ceea ce minimizează inerția de rotație. Desigur, asta crește costul.
zgomot electric
periile și comutatorul formează un fel de comutator electric. Pe măsură ce motorul se rotește, întrerupătoarele sunt deschise și închise, în timp ce curentul semnificativ curge prin înfășurările rotorului, care sunt inductive. Acest lucru duce la arc la contacte. Acest lucru generează o cantitate mare de zgomot electric, care poate fi cuplat în circuite sensibile. Arcul poate fi oarecum atenuat prin adăugarea de condensatori sau snubbers RC peste perii, dar comutarea instantanee a comutatorului generează întotdeauna un zgomot electric.
zgomot acustic
motoarele periate sunt „comutate greu” – adică curentul este mutat brusc de la o înfășurare la alta. Cuplul generat variază în funcție de rotația rotorului pe măsură ce înfășurările sunt pornite și oprite. Cu un motor fără perii, este posibil să controlați curenții de înfășurare într-un mod care trece treptat curentul de la o înfășurare la alta. Acest lucru scade unda cuplului, care este o pulsație mecanică a energiei pe rotor. Unda cuplului provoacă vibrații și zgomot mecanic, în special la viteze reduse ale rotorului.
Cost
deoarece motoarele fără perii necesită electronice mai sofisticate, costul total al unei acționări fără perii este mai mare decât cel al unui motor cu perie. Chiar dacă un motor fără perii este mai simplu de fabricat decât un motor periat, deoarece îi lipsesc periile și un comutator, tehnologia motorului periat este foarte matură, iar costurile de fabricație sunt scăzute. Acest lucru se schimbă pe măsură ce motoarele fără perii devin mai populare, în special în aplicațiile cu volum mare, cum ar fi motoarele auto. De asemenea, costul electronicelor, cum ar fi microcontrolerele, continuă să scadă, făcând motoarele fără perii mai atractive.
rezumat
datorită scăderii costurilor și a performanțelor mai bune, motoarele fără perii câștigă popularitate în multe aplicații. Dar există încă locuri în care motoarele periate au mai mult sens.
multe pot fi învățate analizând adoptarea motoarelor fără perii în automobile. Începând cu 2020, majoritatea motoarelor care funcționează ori de câte ori mașina funcționează – lucruri precum pompele și ventilatoarele – s-au mutat de la motoare periate la motoare fără perii pentru fiabilitatea lor sporită. Costul adăugat al motorului și al electronicii compensează mai mult decât rata mai mică a defecțiunilor pe teren și cerințele de întreținere reduse.
pe de altă parte, motoarele care sunt acționate rar – de exemplu, motoarele care mișcă scaunele electrice și geamurile electrice – au rămas predominant motoare cu perie. Raționamentul este că timpul total de rulare pe durata de viață a mașinii este foarte mic și este foarte puțin probabil ca motoarele să eșueze pe durata de viață a mașinii.
pe măsură ce costul motoarelor fără perii și al electronicelor asociate acestora continuă să scadă, motoarele fără perii își găsesc drumul în aplicații care au fost deținute în mod tradițional de motoarele periate. Ca un alt exemplu din lumea automobilelor, motoarele de reglare a scaunelor din cardul high end au adoptat motoare fără perii, deoarece generează mai puțin zgomot acustic.
obțineți asistență tehnică