stabilizatori și sisteme de stabilizare a navelor
o navă pe mare are șase grade de libertate, adică
1. Rola, 2. Ridicare, 3. Pitch, 4. Yaw, 5. Sway, 6. Surge.
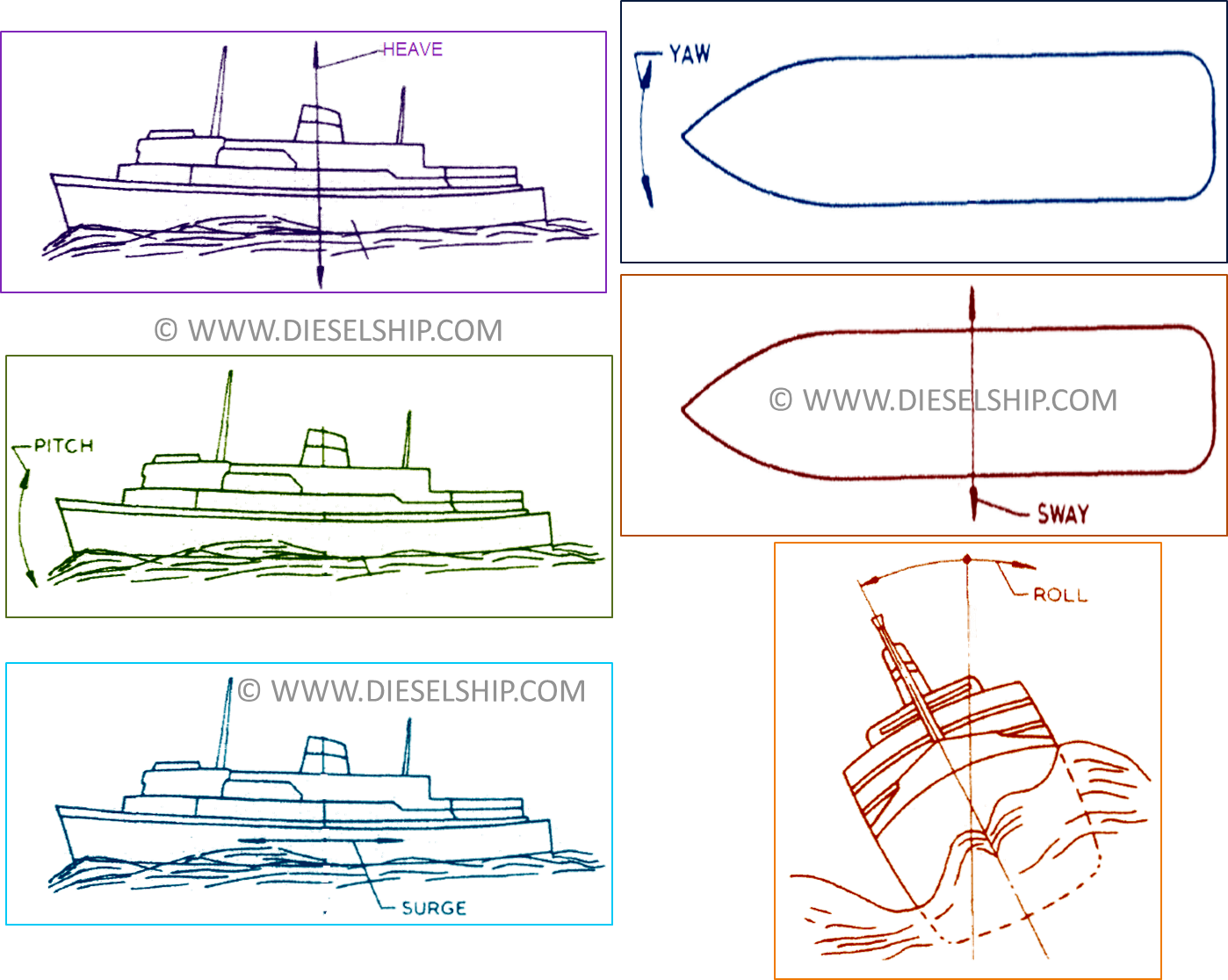
– dintre toate aceste mișcări, numai mișcarea de rulare poate fi redusă în mod eficient în practică prin montarea chilelor de santină, a rezervoarelor anti-rulare sau a stabilizatorilor.
– un sistem de stabilizare este montat pe o navă pentru a reduce mișcarea de rulare. Acest lucru se realizează prin furnizarea unei forțe opuse acelei mișcări care încearcă să rostogolească nava.
- stabilizatorii cu aripioare
- sistemul de stabilizare a rezervorului.
stabilizatori Fin
funcționare de bază:
ați încercat vreodată acest lucru în timp ce călătoriți într-o mașină??
deschideți scutul geamului și puneți-vă mâna toate figurile împreună orientate spre direcția înainte cu palma orientată spre drum în timp ce mașina este în mișcare înainte cu o anumită viteză și asigurați-vă că degetele sunt drepte.
in aceasta conditie, mana ta va ramane dreapta si nu vei infrunta nici o forta deasupra sau dedesubtul degetelor.
1. Acum ridicați ușor degetele în sus și veți vedea că există o ridicare sub degete și mâna dvs. va tinde să urce acest lucru numit lift.
2. Acum puneți toate degetele în jos veți vedea că există o forță de împingere a ascensorului deasupra mâinii și mâna dvs. va tinde să coboare aceasta se numește ‘împingere’ sau ‘ridicare în jos’
3. Acum încetiniți mașina și reduceți viteza și repetați pașii de mai sus, veți vedea că forța de ridicare și împingere este redusă considerabil, ceea ce înseamnă că viteza de tragere este mai importantă pentru a avea o ridicare bună sau o împingere.
tehnica de mai sus vă explică pur și simplu elementele de bază ale tracțiunii, ridicării pozitive și ridicării Negative a unei folii aero sau a aripioarelor Hidrofoil care sunt utilizate pe Nave.
stabilizatori de aripioare
– puterea de stabilizare a aripioarelor este generată de mișcarea lor prin mare (forța de tracțiune) și de ridicare’ creată de fluxul de apă deasupra și dedesubtul formei ‘aerofoil’ sau hidrofoil.
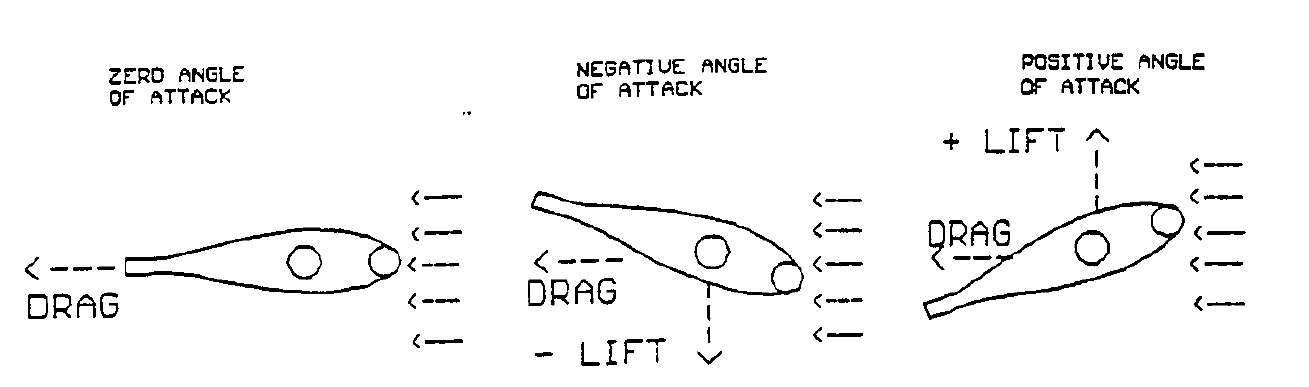
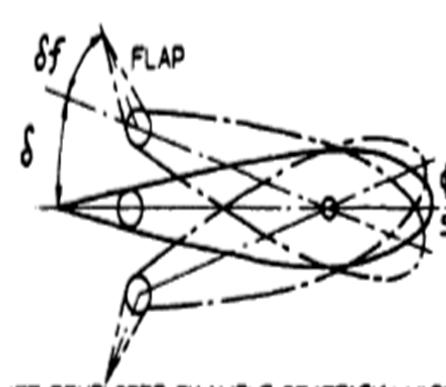
unghiul de atac Zero:
– când nu există nicio mișcare de rulare a navei, aripioarele rămân la unghiul 0o și nu există nicio forță de ridicare sau împingere oferită aripioarelor, așa cum se arată în figura de mai sus.
negativ & unghi pozitiv de atac:
– de îndată ce nava începe să se rostogolească, care este sesizată de senzori, de exemplu, să spunem că nava se rostogolește din stare stabilă în partea portului, înotătoarea portului este înclinată în sus (unghi negativ de atac) care are o ridicare negativă, adică înotătoarea are o ridicare de jos sau o împingere de jos. Această forță ridică partea de babord a navei pentru a anula mișcarea de rulare către babord și, în același timp, aripioarele de tribord sunt înclinate în jos (unghi pozitiv de atac) și, prin urmare, nava experimentează o tragere spre tribord.însumarea acestor două forțe contracarează forța de undă sau vânt care tinde să încline nava spre babord.
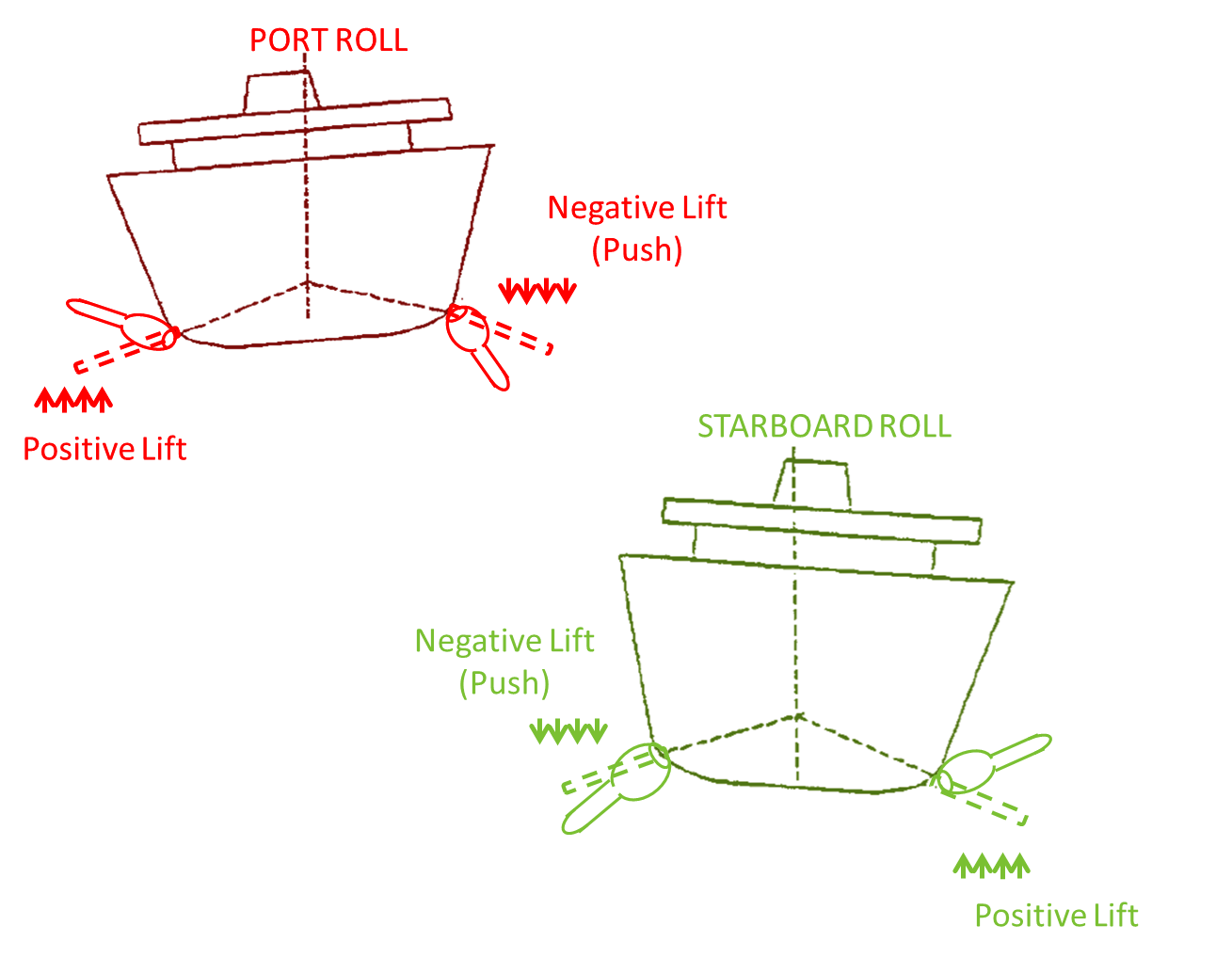
– când marginea frontală a aripioarei este înclinată în sus, fluxul de apă peste partea superioară a profilului produce ridicare datorită unei scăderi a presiunii, în timp ce o presiune de ridicare este asigurată de curgerea de-a lungul părții inferioare. Înclinarea în jos a marginii înainte a aripioarei inversează efectul, astfel încât să apară o scădere a presiunii în partea inferioară și o presiune crescută în partea de sus pentru a da o forță descendentă.
tip de aripioare
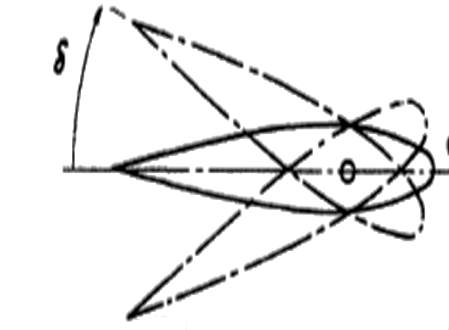
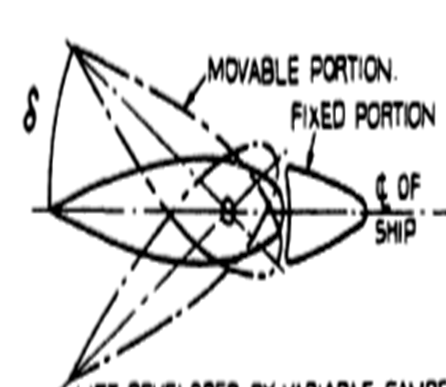
– secțiunea hidrofoil poate fi complet mobilă, cu sau fără clapete sau parțial fixă, parțial mobilă, aceste aripioare sunt înclinate, de obicei hidraulic, în fază cu rola la perioade lungi de undă, 90 de la sută nefazate la rezonanță și în fază cu accelerația rolei la perioade scurte.
aripioare cu toată suprafața mobilă
 aripioare cu toată suprafața mobilă cu clapetă suplimentară pentru coadă
aripioare cu toată suprafața mobilă cu clapetă suplimentară pentru coadă
aripioare cu structură fixă
– aripioarele neretractabile sunt utilizate în mod obișnuit acolo unde spațiul din interiorul corpului este limitat. Acestea sunt de obicei montate la virajul santinei și nu se proiectează dincolo de linia verticală din partea navei sau sub linia orizontală a fundului navei, pentru a minimiza riscul de contact cu un perete de chei sau cu fundul docului.
– arborele aripioarelor, de care aripioarele sunt fixate rigid, trece printr-o glandă de mare într-o placă de montare sudată sau înșurubată pe corp și este susținut de doi rulmenți semnificativi, o pârghie cu două capete fixată la capătul interior al arborelui aripioarelor este acționată de berbeci hidraulici alimentați de la o pompă de livrare variabilă acționată electric.
cum este controlată mișcarea aripioarelor?
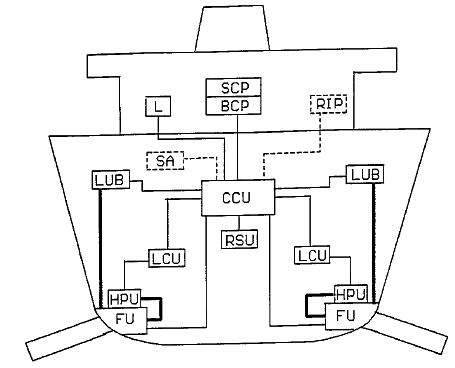
linii mai groase = linii hidraulice ; linii mai subțiri = linii electrice
SCP = panou de Control SOLAS, BCP = Panou de Control Bridge, l = jurnalul navei, RIP = panou Indicator de la distanță, sa = automatizarea navei, lub = Rezervor de ulei lubrifiant, CCU = unitate centrală de Control, RSU = unitate senzor de rulare, LCU = unitate de Control locală, HPU = Unitate hidraulică de alimentare, FU = unitate de Fin.
– controlul mișcării aripioarelor este automat și este de obicei derivat din angrenaj de detectare giroscopic care, în forma sa cea mai simplă — controlul vitezei – se bazează pe un giroscop mic, acționat electric, montat orizontal cu axa sa athwartships.
– viteza unghiulară de rulare a navei determină giroscopul să proceseze împotriva arcurilor de centralizare la o cantitate proporțională cu viteza și generează o forță mică care este amplificată hidraulic de o unitate de releu hidraulic pentru a furniza o putere suficientă pentru a acționa comenzile pompei de livrare variabile printr-o legătură adecvată.
– o parte a legăturii este cuplată la arborele aripioarelor pentru a transmite un semnal de anulare la comanda pompei și pentru a aduce aripioarele în repaus la unghiul de înclinare cerut de unitatea de detectare.
– acest tip de control este adesea montat în instalații mici, de obicei din motive economice, și este cel mai eficient împotriva rulării rezonante.
– navele rareori se rostogolesc într-un mod pur rezonant; starea mării este adesea foarte confuză. Sunt necesare sisteme de control mai elaborate și mai scumpe pentru a face față rulării brusc aplicate, rulării la perioade de rezonanță și rulării în condiții care decurg din combinarea mai multor frecvențe de undă.
– o unitate de detectare bazată pe un giroscop de menținere verticală și un giroscop de viteză cuplat în unități de diferențiere și însumare permite controlul mișcării aripioarelor printr-o funcție compusă derivată din unghiul de rulare, viteza de rulare și accelerația ruloului. Prin adăugarea unei unități ‘listă naturală’, stabilizarea se realizează cu privire la punctul mediu de rulare și astfel reduce atât propulsia, cât și stabilizarea cererii de energie. Acesta este cunoscut sub numele de sistem de control compensat și este utilizat în general în instalații mari.
unitate senzor RSU-Roll în detaliu (sistem de control compensat)
sistem de control compensat