Modellbeskrivning
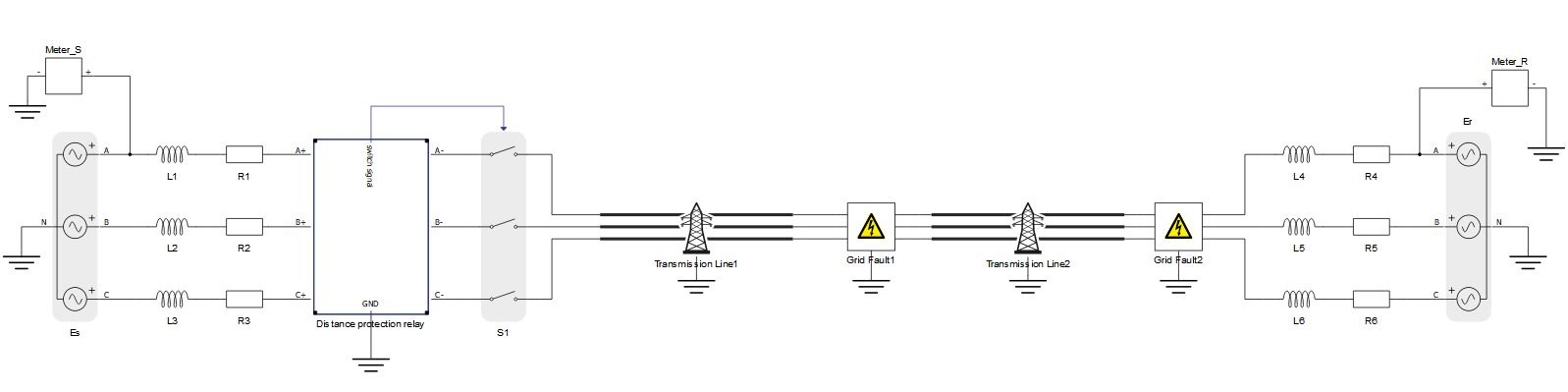
den elektriska delen av modellen visas i Figur 2.På båda sidor av schemat finns det3-fasnät med RL-impedans. Parametrarna för gallret är V = 230 V och f = 60 Hz.Rutorna är anslutna med en överföringsledning, med längd 100 km. Vid överföringsledningen finns två fel: ett 3-fasfel i mitten och ett 1-fasfel i slutet av överföringsledningen.Mellan gallret på vänster sida och överföringsledningen finns ett Avståndsskyddsreläsom styr kontaktorn som ligger bredvid den.
Figur 2: Typhoon HIL schematisk modell för ett Avståndsskyddsrelä
skyddslogiken som implementeras i Distansskyddsreläblocket innehåller en ClosingOpening Difference Operator (CODO) – algoritm och en feldetektering för mätning, vilkenger ingångar till reslogiken. Detta visas i detalj i Figur 3.
Figur 3: skyddsalgoritm för ett Distansskyddsrelä
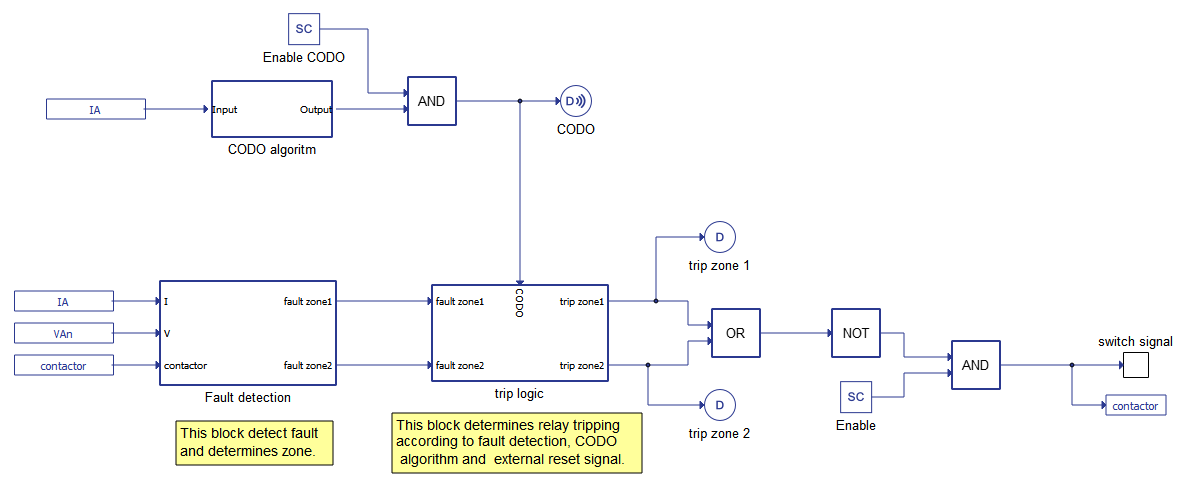
feldetekteringsblocket är ansvarigt för att upptäcka felet i överföringslinjenoch bestämma om felet är inne i zon 1, zon 2 eller i båda. Feldetekteringsåtgärderfel impedans enligt spänning och ström i fas a:
Zmeasured= VarmsIarms
whereZmeasuredis impedans observerad av reläet, medanvarmsandiarmsär RMS-värdena för spänning och ström uppmätt av reläet.
varje punkt i det komplexa planet definieras av R (x-axeln) och X (y-axeln) enligt följande formler:
Rmeasured= Zmeasured cos securiczylv(i)
xmeasured= Zmeasured sin securiczylv(i)
wherermeasuredandxmeasuredareär motståndet och reaktansen observerad av reläet, och augoliv, I är fasskillnaden mellan ström och spänning.
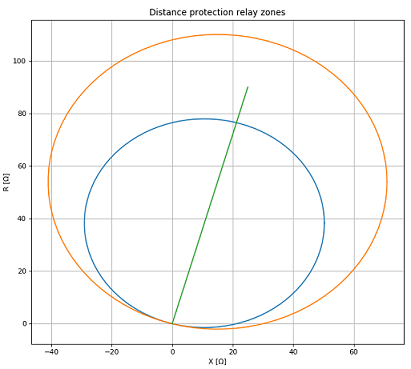
feldetekteringsblocket ger felsignaler till felzon 1 och felzon 2 beroende på de uppmätta värdena och inställningarna för zonens räckvidd och överföringslinjens egenskaper. Förhandsgranskningen av avståndsskyddszoner kan nås genom att klicka påförhandsknappen i Avståndsskyddsreläkomponenten som visas i Figur 4.
Figur 4: Förhandsvisning av skyddszoner
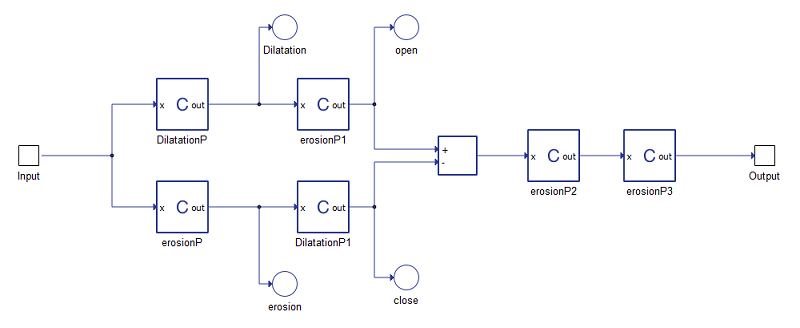
den avslutande öppna skillnaden Operator (CODO) algoritm blocket innehåller C funktionsblock som calculatethe felfiltreringssignal enligt modellen baserad på matematisk morfologi (MM).MM är en icke-linjär signal transformation verktyg för icke-periodiska transienta signaler.Den matematiska beräkningen som ingår i MM inkluderar endast addition, subtraktion, maximum, och minsta operationer-lämplig för realtid application.MM består av två grundläggande operationer-utvidgning och erosion. Grundläggande definitioner av MM-operatörer listas nedan:
Dilatation:
ydn=f ⊕gn=maxf(n-m+gm, n-m∈Df, m ∈Dg
Erosion:
yen=f ⊖gn=minf(n+m-gm, n+m∈Df, m ∈Dg
Öppning:
y0n=f ⊖g⊕g(n)
Utgående:
ycn=f ⊕g⊖g(n)
Den algoritm som vi kan få CODO signalen bildas med hjälp av ekvationer (4), (5),(6), och (7). Dess realisering i modellen visas i Figur 5.
Figur 5: Förhandsvisning av skyddszoner
slutligen är trip logic-blocket ansvarigt för att beräkna trippsignaler enligt feldetekteringssignalen,Codo-algoritmsignalen och en extern återställningssignal.