Fartygsstabilisatorer och stabiliseringssystem
ett fartyg till sjöss har sex frihetsgrader, dvs.
1. Rulla, 2. Häva, 3. Pitch, 4. Gir, 5. Sway, 6. Ökning.
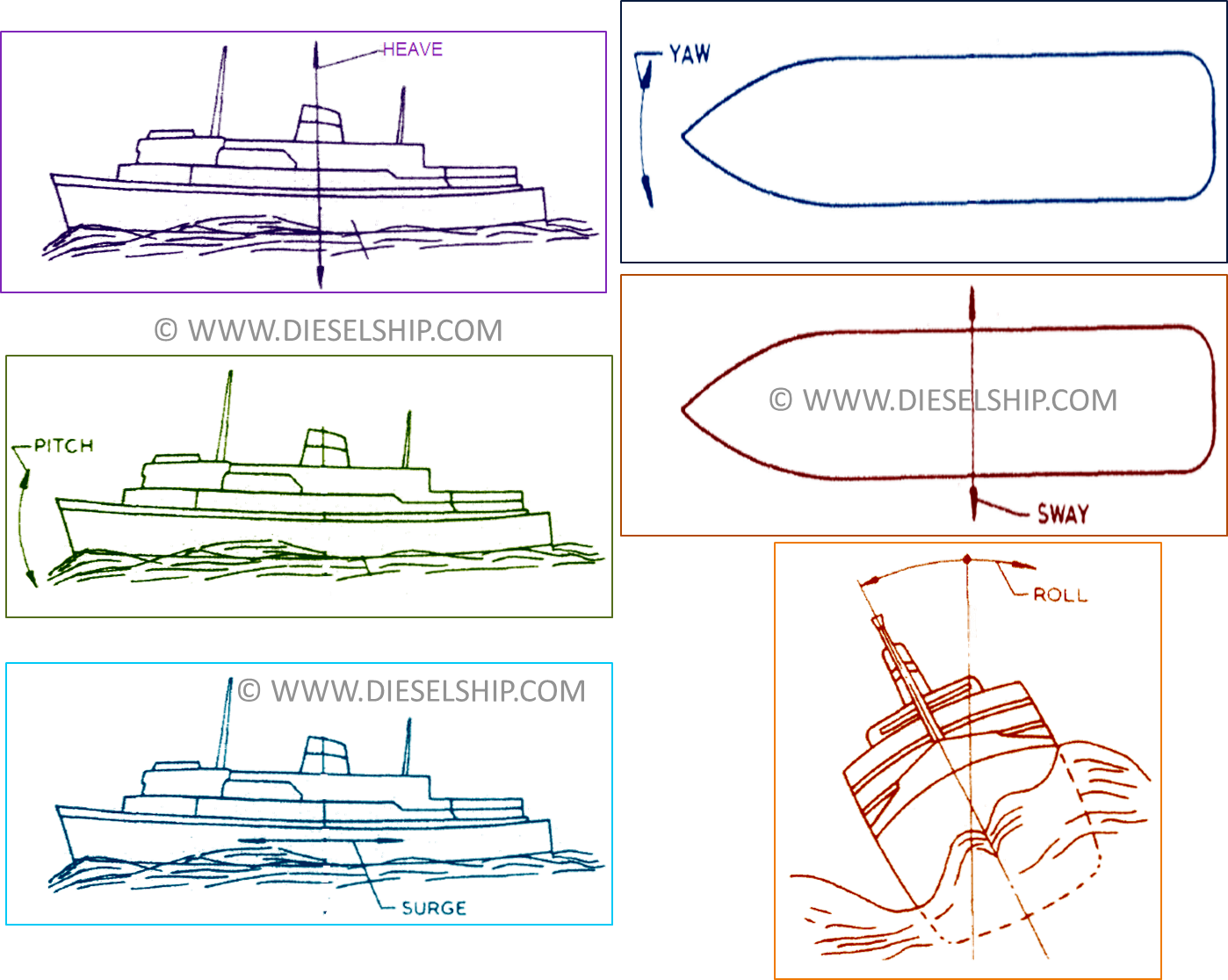
– av alla dessa rörelser kan endast rullande rörelse effektivt minskas i praktiken genom att montera länsköl, antirulltankar eller stabilisatorer.
- fenstabilisatorerna
- Tankstabiliserande system.
Finstabilisatorer
grundläggande drift:
har du någonsin provat detta när du reser i en bil??
öppna fönsterskyddet och lägg ut alla dina figurer tillsammans mot framåtriktningen med handflatan mot vägen medan bilen är i rörelse framåt med viss hastighet och se till att fingrarna är raka.
vid detta tillstånd kommer din hand att vara rak och du kommer inte att möta någon kraft över eller under dina fingrar.
1. Nu något lyfta fingrarna uppåt och du kommer att se att det finns ett lyft under fingrarna och din hand tenderar att gå uppåt detta kallas som en ’hiss’.
2. Lägg nu alla fingrarna nedåt så ser du att det finns en lyftkraft på toppen av din hand och din hand tenderar att gå nedåt detta kallas en ’push’ eller ’Downward lift’
3. Nu sakta ner bilen och minska hastigheten och upprepa ovanstående steg kommer du att se hissen och tryckkraften minskas avsevärt, vilket innebär att draghastigheten är viktigare att ha en bra hiss eller en push.
ovanstående teknik förklarar helt enkelt du grundläggande Drag, positiv hiss och negativ Hiss av en aero folie eller bärplansbåt fenor som används på fartyg.
Finstabilisatorer
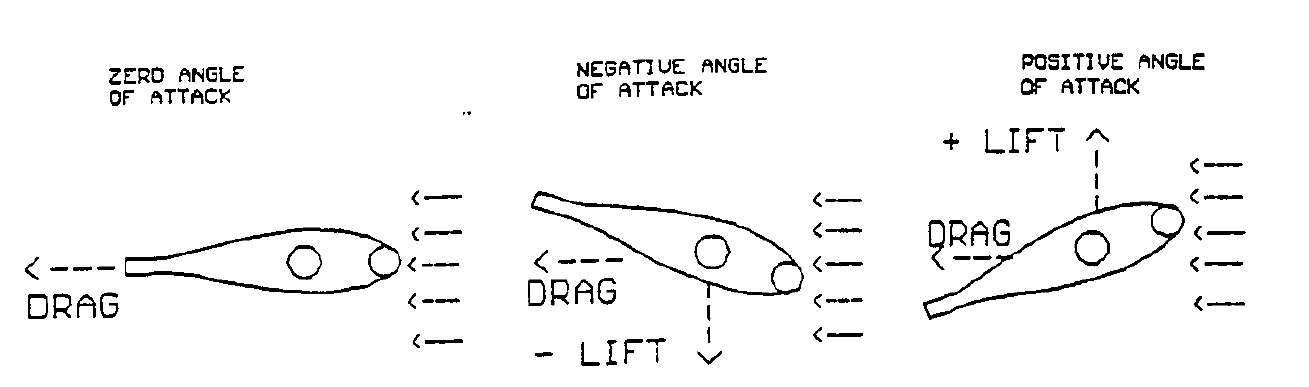
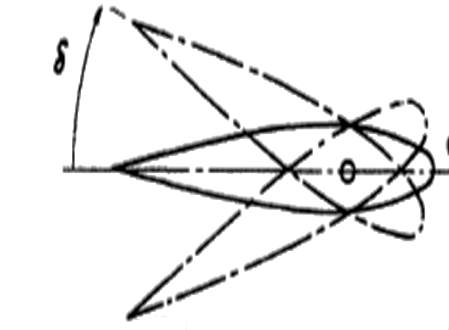
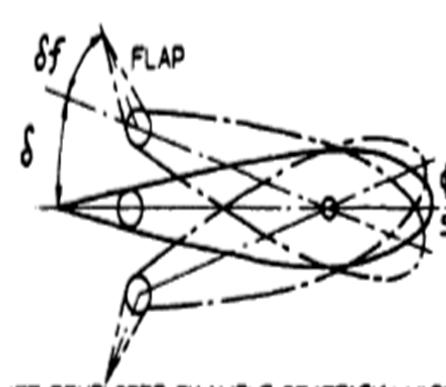
noll angreppsvinkel:
– när det inte finns någon rullande rörelse av fartyget stannar fenorna i 0o-vinkel och det finns ingen lyft-eller tryckkraft som erbjuds fenorna som visas i figuren ovan.
negativ & positiv angreppsvinkel:
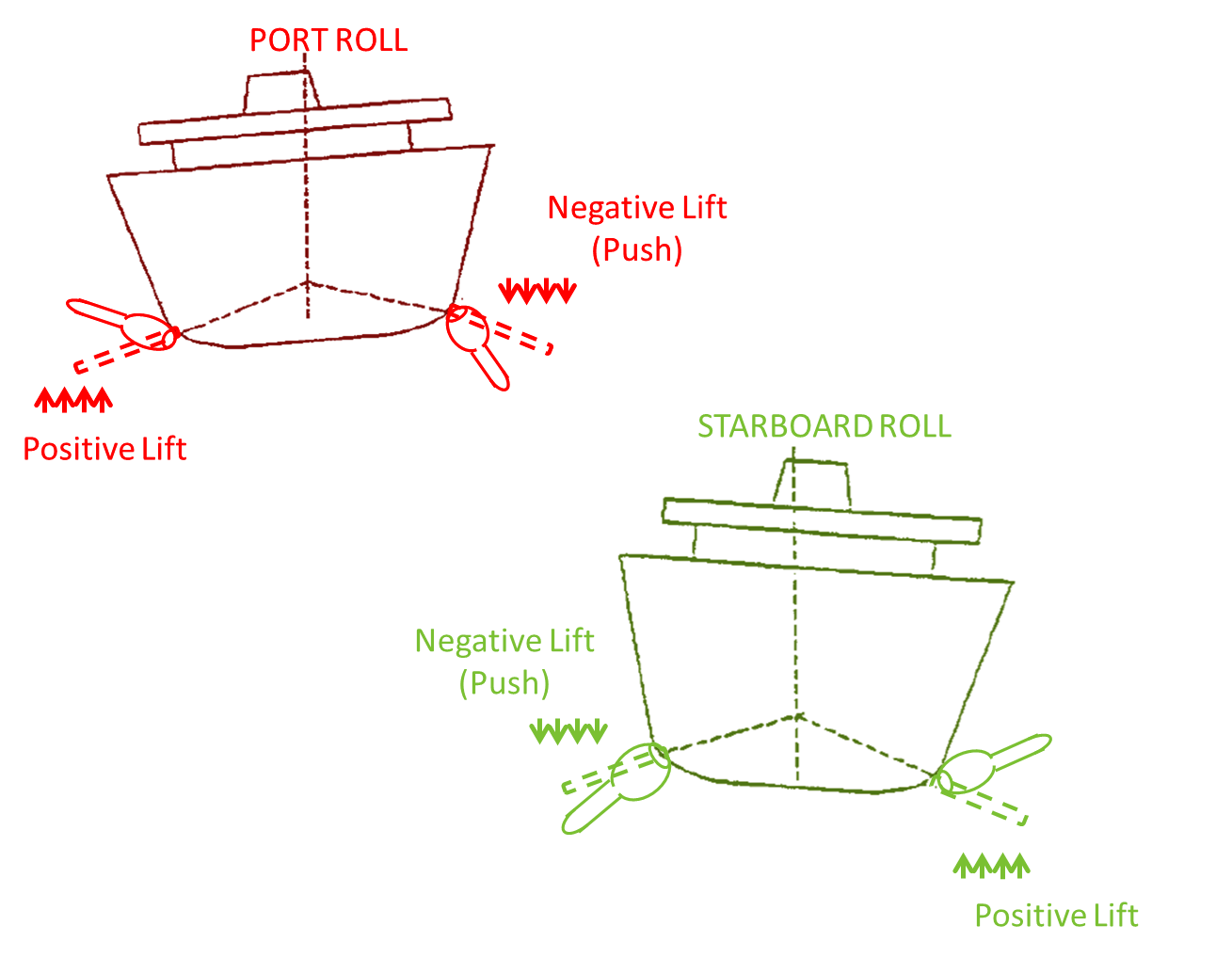
– när den främre kanten av fenan lutas upp, vattenflödet över toppen av profilen producerar lyft på grund av ett tryckfall medan en lyfttryck tillhandahålls av flödet längs undersidan. Nedåtgående lutning av fenans främre kant, inverterar effekten, så att ett tryckfall uppträder vid undersidan och ökat tryck på toppen för att ge en nedåtgående kraft.
– utan en rimlig hastighet för framåtriktad rörelse (Drag) av fartyget är fenorna ineffektiva. Således är dessa typer av aktiva fenstabilisatorer monterade på de snabbare typerna av fartyg, som arbetar med kanske femton eller fler knop.
typ av fenor
fenor med all rörlig yta
 fenor med all rörlig yta med extra svansflik
fenor med all rörlig yta med extra svansflik
fenor med fast struktur
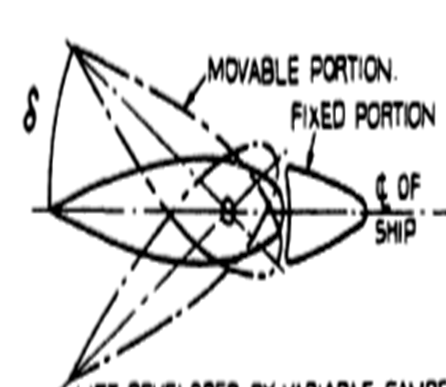
– icke-infällbara fenor används ofta där utrymmet i skrovet är begränsat. De är vanligtvis monterade vid svängen av länsen och skjuter inte ut bortom den vertikala linjen från fartygets sida eller under den horisontella linjen på fartygets botten för att minimera risken för kontakt med en kajvägg eller dockningsbotten.
hur finrörelsen styrs?
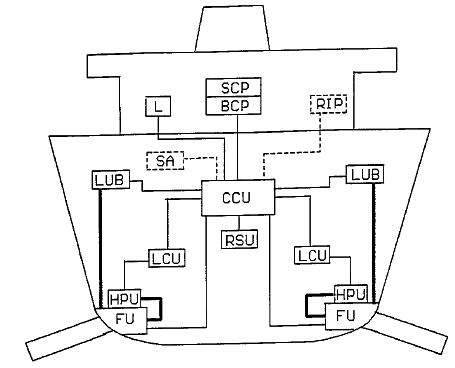
tjockare linjer = hydrauliska linjer; tunnare linjer = elektriska ledningar
SCP = SOLAS kontrollpanel, BCP = Brokontrollpanel, L = fartygets logg, RIP = Fjärrindikatorpanel, SA = fartygets automatisering, LUB = Smörjoljetank, CCU = Central styrenhet, RSU = Rullsensorenhet, LCU = lokal styrenhet, HPU = hydraulisk kraftenhet, FU = Finenhet.
– styrningen av finrörelsen är automatisk och härrör vanligtvis från gyroskopisk avkänningsutrustning som i sin enklaste form — hastighetskontroll – är baserad på ett litet, elektriskt drivet gyroskop monterat horisontellt med sin axel på varv.
– fartyg rullar sällan i ett rent resonansläge; sjöstaten är ofta mycket förvirrad. Mer detaljerade och dyrare styrsystem krävs för att hantera plötsligt applicerad rulle, rullning vid perioder av resonans och rullning under förhållanden som härrör från kombinationen av flera vågfrekvenser.
– en avkänningsenhet baserad på ett vertikalt hållande gyroskop och ett hastighetsgyroskop kopplat till differentierings-och summeringsenheter gör att finrörelsen kan styras av en sammansatt funktion härledd från rullvinkel, Rullhastighet och rullacceleration. Genom att lägga till en ’natural list’ – enhet uppnås stabilisering kring den genomsnittliga rullpunkten och minskar både framdrivning och stabiliserande effektbehov. Detta kallas ett kompenserat styrsystem och används vanligtvis i stora installationer.
RSU-Roll sensorenhet i detalj (kompenserat styrsystem)
kompenserat styrsystem