lodní stabilizátory a stabilizační systémy
loď na moři má šest stupňů volnosti, tj.
1. Rohlík, 2. Heave, 3. Smola, 4. Jágr, 5. Sway, 6. Nárůst.
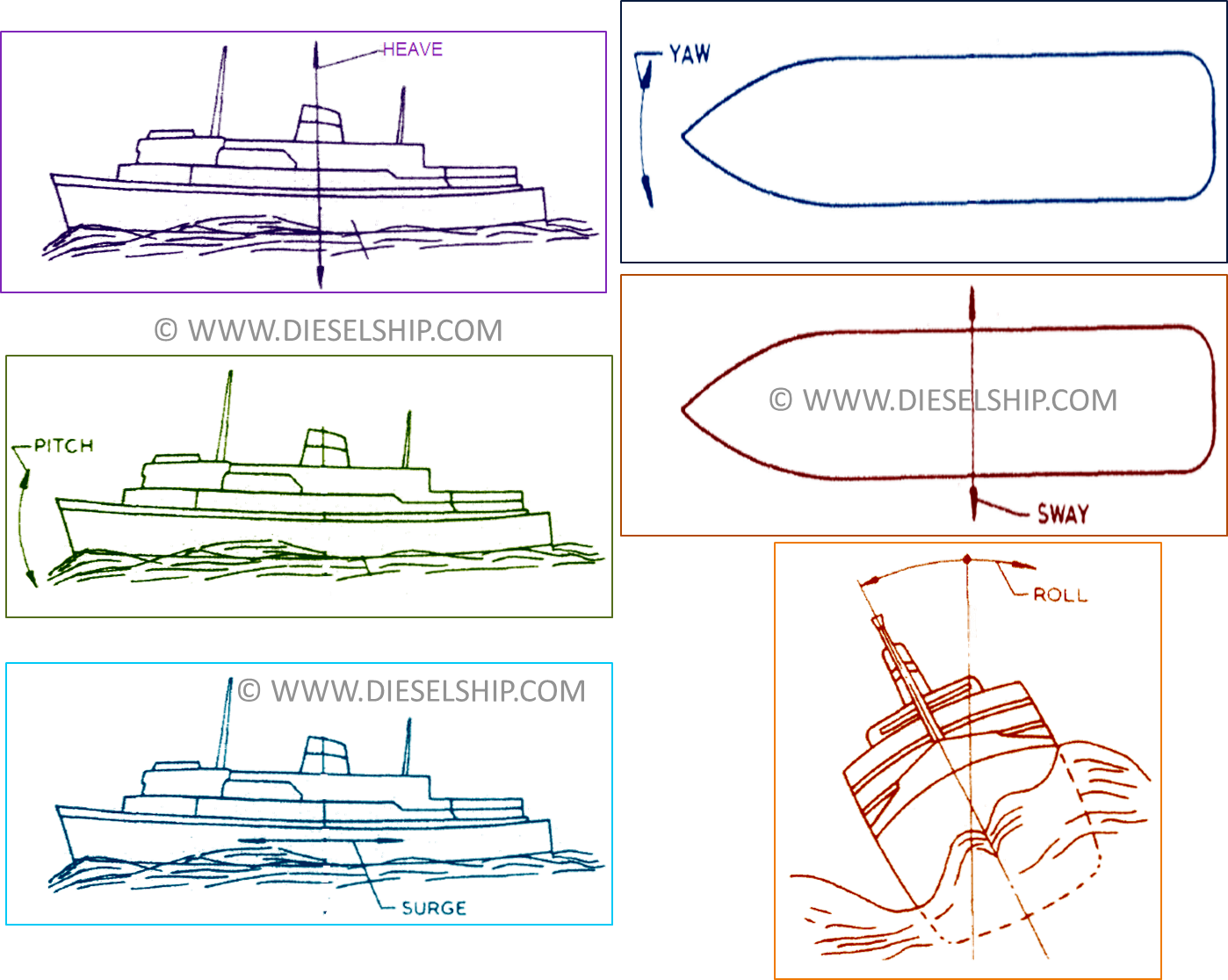
– ze všech těchto pohybů lze v praxi účinně omezit pouze valivý pohyb namontováním drenážních kýlů, protiběžných nádrží nebo stabilizátorů.
– na loď je namontován stabilizační systém, aby se snížil valivý pohyb. Toho je dosaženo poskytnutím opačné síly k tomuto pohybu, který se pokouší převrátit loď.
– na lodích se používají dva základní stabilizační systémy;
- stabilizátory fin
- stabilizační systém nádrže.
Fin stabilizátory
Základní provoz:
už jste to někdy vyzkoušeli, když cestujete v autě??
otevřete okenní štít a dejte všechny své postavy dohromady směrem dopředu s dlaní směřující k silnici, zatímco auto je v pohybu vpřed určitou rychlostí a ujistěte se, že vaše prsty jsou rovné.
v tomto stavu vaše ruka zůstane rovná a nebudete čelit žádné síle nad nebo pod prsty.
1. Nyní mírně zvedněte prsty nahoru a uvidíte, že pod prsty je výtah a vaše ruka bude mít tendenci jít nahoru, což se nazývá „výtah“.
2. Nyní položte všechny prsty dolů, uvidíte, že na horní straně ruky je tlaková síla výtahu a vaše ruka bude mít tendenci jít dolů, což se nazývá „push“ nebo „Down Down“
3. Nyní zpomalte auto a snižte rychlost a opakujte výše uvedené kroky, uvidíte, že síla zvedání a tlačení je výrazně snížena, což znamená, že Rychlost tažení je důležitější pro dobrý zdvih nebo tlak.
výše uvedená technika vám jednoduše vysvětlí základy tažení, kladného a záporného zdvihu aero fólie nebo křídlových ploutví, které se používají na lodích.
stabilizátory ploutví
– stabilizační síla ploutví je generována jejich pohybem po moři (tažná síla)a zdvihem „vytvořeným proudem vody nad a pod tvarem „aerofoilu“ nebo křídlového křídla.
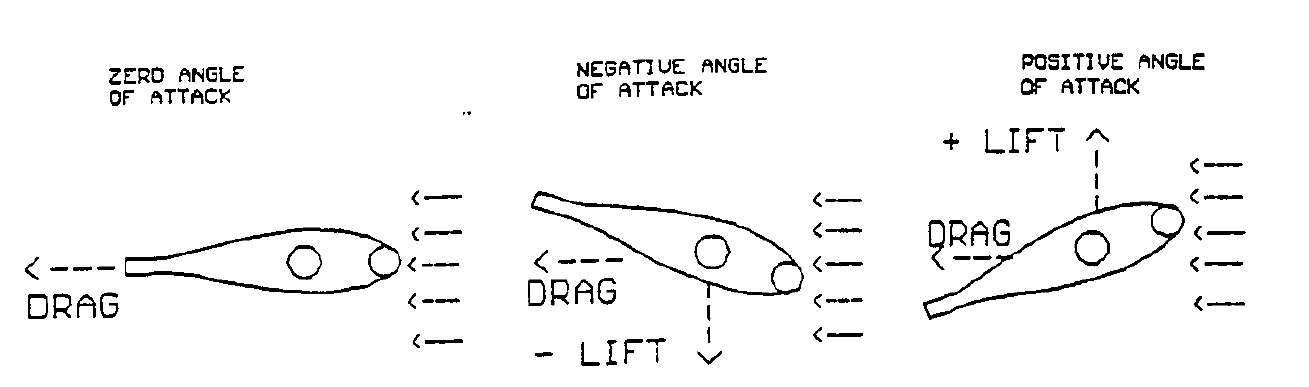
nulový úhel náběhu:
– pokud nedochází k žádnému valivému pohybu lodi, zůstávají ploutve v úhlu 0o a na ploutve není nabízena žádná Zvedací nebo tlačná síla, jak je znázorněno na obrázku výše.
negativní & pozitivní úhel útoku:
– jakmile se loď začne valit, což je snímáno senzory, například říkají, že se loď valí ze stabilního stavu na stranu přístavu, je přístavní ploutev nakloněna nahoru (Negativní úhel náběhu), které zažívají negativní zdvih, tj. Tato síla zvedá levobokovou stranu lodi, aby zrušila valivý pohyb na levobok a současně je pravoboková ploutev nakloněna dolů (pozitivní úhel útoku), a proto loď zažívá tah směrem k pravoboku součet těchto dvou sil působí proti vlnové nebo větrné síle, která má tendenci naklonit loď na stranu přístavu.
– nyní má loď tendenci se valit na pravobok a výše uvedená akce je jednoduše obrácena, aby nabídla tlak na pravobok a tah na levobok.
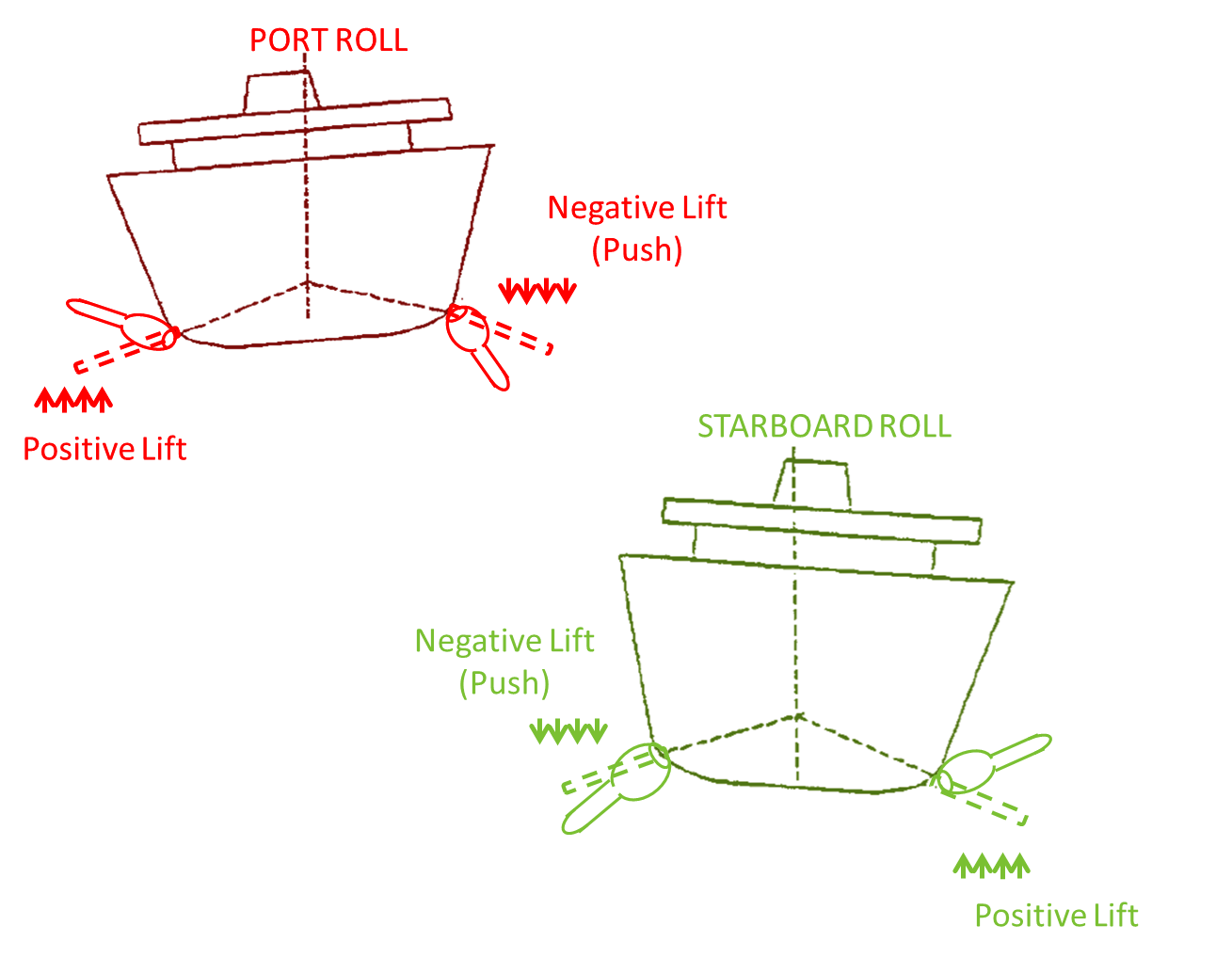
– když je přední hrana žebra nakloněna nahoru, průtok vody přes horní část profilu vytváří zdvih v důsledku poklesu tlaku, zatímco zdvihací tlak je zajištěn průtokem podél spodní strany. Sklon přední hrany ploutve směrem dolů převrací účinek, takže na spodní straně dochází k poklesu tlaku a zvýšenému tlaku nahoře, aby se dosáhlo síly dolů.
– bez přiměřené rychlosti dopředného pohybu (tažení) lodi jsou ploutve neúčinné. Tento druh aktivních stabilizátorů ploutví je tedy namontován na rychlejší typy lodí, pracující na možná patnácti nebo více uzlech.
Typ žeber
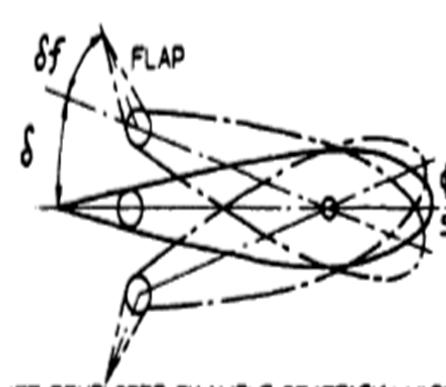
– křídlová sekce může být celo-pohyblivá, s klapkami nebo bez nich nebo částečně pevná, částečně pohyblivá, tato žebra jsou nakloněna, obvykle hydraulicky, ve fázi s válcem při dlouhých vlnových obdobích, 90° mimo fázi při rezonanci a ve fázi se zrychlením válce v krátkých obdobích.
ploutve se všemi pohyblivými plochami
 ploutve se všemi pohyblivými plochami s přídavnou ocasní klapkou
ploutve se všemi pohyblivými plochami s přídavnou ocasní klapkou
ploutve s pevnou konstrukcí
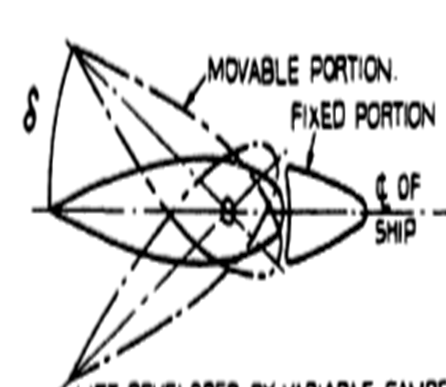
– nezatahovací ploutve se běžně používají tam, kde je omezený prostor v trupu. Obvykle se montují na přelomu příkopu a nevystupují za svislou čáru ze strany lodi nebo pod vodorovnou čáru dna lodi, aby se minimalizovalo riziko kontaktu s nábřežní stěnou nebo dnem doku.
– hřídel žeber, ke kterému je žebro pevně připevněno, prochází mořskou průchodkou v montážní desce přivařené nebo přišroubované k trupu a je nesena dvěma podstatnými ložisky, Páka s dvojitým koncem připevněná k vnitřnímu konci hřídele žeber je ovládána hydraulickými beranymi dodávanými z elektricky poháněného variabilního dodávacího čerpadla.
jak je pohyb ploutví řízen?
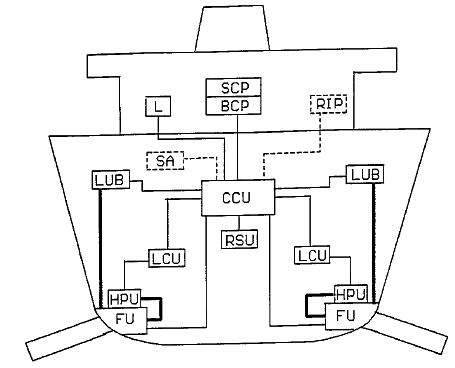
silnější vedení = hydraulické vedení; tenčí vedení = elektrické vedení
SCP = ovládací panel SOLAS, BCP = ovládací Panel mostu, L = lodní deník, RIP = Panel dálkového indikátoru, SA = automatizace lodi, lub = olejová nádrž Lube, CCU = centrální řídicí jednotka, RSU = jednotka snímače role, LCU = místní řídicí jednotka, HPU = Hydraulická pohonná jednotka, FU = Fin jednotka.
– řízení pohybu ploutví je automatické a je obvykle odvozeno od gyroskopického snímacího zařízení, které je ve své nejjednodušší formě-řízení rychlosti-založeno na jednom malém elektricky poháněném gyroskopu namontovaném vodorovně se svou osou.
– úhlová rychlost válcování lodi způsobuje, že gyroskop zpracovává proti centralizačním pružinám na množství úměrné rychlosti a vytváří malou sílu, která je hydraulicky zesílena hydraulickou reléovou jednotkou, aby poskytla dostatečný výkon pro ovládání ovládacích prvků variabilního dodávacího čerpadla pomocí vhodného spojení.
– část táhla je spojena s hřídelí žeber pro přenos rušivého signálu do řízení čerpadla a pro uvedení žebra do klidu v úhlu náklonu požadovaném snímací jednotkou.
– tento typ řízení je často instalován v malých instalacích, obvykle z ekonomických důvodů, a je nejúčinnější proti rezonančnímu válcování.
– lodě se zřídka valí v čistě rezonančním režimu; stav moře je často velmi zmatený. Propracovanější a dražší řídicí systémy se musí vypořádat s náhle aplikovaným válcem, válcováním v obdobích mimo rezonanci a válcováním v podmínkách vyplývajících z kombinace několika vlnových frekvencí.
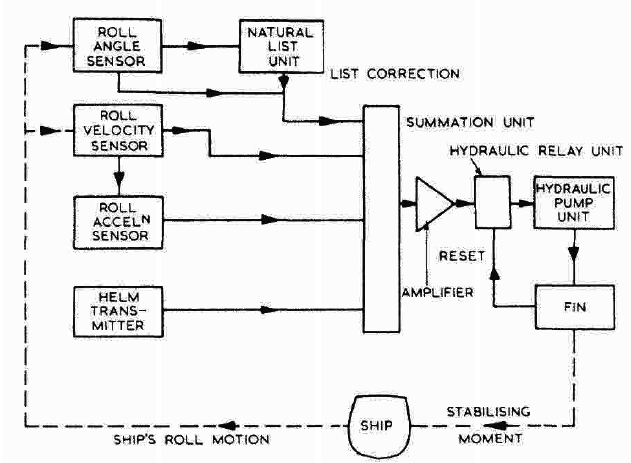
– snímací jednotka založená na vertikálním gyroskopu a rychlostním gyroskopu Spojeném do diferenciačních a součtových jednotek umožňuje řízení pohybu ploutví pomocí složené funkce odvozené z úhlu role, rychlosti role a zrychlení role. Přidáním jednotky „přirozeného seznamu“ se dosáhne stabilizace kolem středního bodu válce a tím se sníží jak poptávka po pohonu, tak i po stabilizačním výkonu. Toto je známé jako kompenzovaný řídicí systém a obvykle se používá ve velkých instalacích.
RSU-Roll senzorová jednotka v detailu (kompenzovaný řídicí systém)
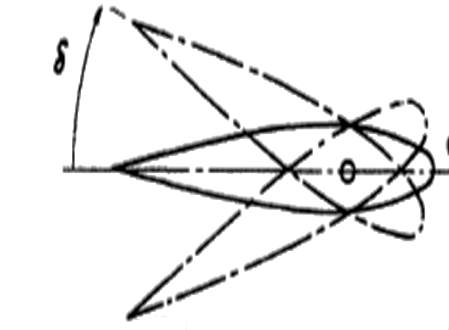
 – redukce role přesahující 90%, typicky 30° out-to-out snížená na méně než 3° out-to-out, může být dosažena při rezonanci a nízké zbytkové válce mohou být udržovány v širokém rozsahu frekvencí. Protože se však stabilizační síla mění jako čtverec rychlosti lodi, ploutve jsou nejméně účinné při nízké nebo nulové rychlosti, kde fungují pouze jako přídavné drenážní kýly.
– redukce role přesahující 90%, typicky 30° out-to-out snížená na méně než 3° out-to-out, může být dosažena při rezonanci a nízké zbytkové válce mohou být udržovány v širokém rozsahu frekvencí. Protože se však stabilizační síla mění jako čtverec rychlosti lodi, ploutve jsou nejméně účinné při nízké nebo nulové rychlosti, kde fungují pouze jako přídavné drenážní kýly.