artikel
Pete Millett

få værdifulde ressourcer direkte til din indbakke-sendt ud en gang om måneden
vi værdsætter dit privatliv
introduktion
mange motion control applikationer bruger permanent magnet DC motorer. Da det er lettere at implementere styresystemer ved hjælp af jævnstrømsmotorer sammenlignet med vekselstrømsmotorer, bruges de ofte, når hastighed, drejningsmoment eller position skal styres.
der er to typer almindeligt anvendte jævnstrømsmotorer: børstede motorer og børsteløse motorer (eller BLDC-motorer). Som deres navne antyder, har DC-børstede motorer børster, som bruges til at kommutere motoren for at få den til at dreje. Børsteløse motorer erstatter den mekaniske kommutationsfunktion med elektronisk styring.
i mange applikationer kan enten en børstet eller børsteløs DC-motor bruges. De fungerer baseret på de samme principper for tiltrækning og frastødning mellem spoler og permanente magneter. Begge har fordele og ulemper, der kan få dig til at vælge den ene frem for den anden, afhængigt af din applikations krav.
DC børstede motorer
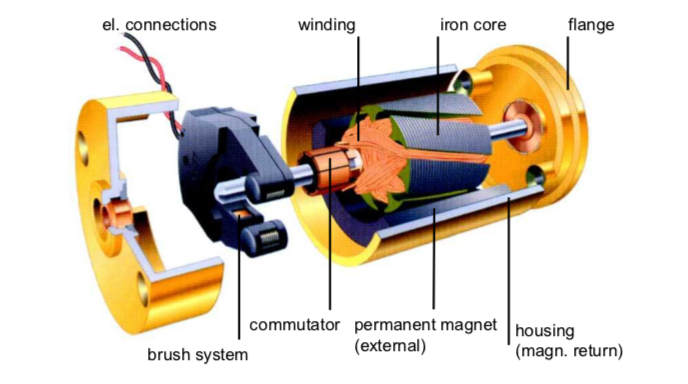
DC børstede motorer (billede af maks.gruppe)
DC-motorer bruger viklede trådspoler til at skabe et magnetfelt. I en Børstet motor er disse spoler fri til at rotere for at drive en aksel – de er den del af motoren, der kaldes “rotoren”. Normalt vikles spolerne omkring en jernkerne, selvom der også er børstede motorer, der er “kerneløse”, hvor viklingen er selvunderstøttet.
den faste del af motoren kaldes “statoren”. Permanente magneter bruges til at tilvejebringe et stationært magnetfelt. Normalt er disse magneter placeret på statorens indre overflade uden for rotoren.
for at skabe drejningsmoment, der får rotoren til at dreje, skal Rotorens magnetfelt kontinuerligt rotere, så dets felt tiltrækker og afviser statorens faste felt. For at få feltet til at rotere, anvendes en glidende elektrisk kontakt. Kontakten består af kommutatoren, som typisk er en segmenteret kontakt monteret på rotoren, og faste børster, der er monteret på statoren.
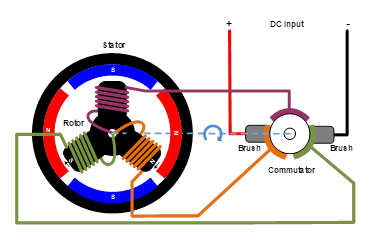
når rotoren drejer, tændes og slukkes forskellige sæt rotorviklinger konstant af kommutatoren. Dette får Rotorens spoler til konstant at blive tiltrukket og frastødt fra statorens faste magneter, hvilket får rotoren til at dreje.
da der er en vis mekanisk friktion mellem børsterne og kommutatoren – og da det er en elektrisk kontakt, kan den generelt ikke smøres – er der mekanisk slid på børsterne og kommutatoren i motorens levetid. Dette slid vil til sidst nå et punkt, hvor motoren ikke længere fungerer. Mange børstede motorer – især store-har udskiftelige børster, typisk lavet af kulstof, som er designet til at opretholde god kontakt som slid. Disse motorer kræver periodisk vedligeholdelse. Selv med udskiftelige børster bærer kommutatoren til sidst også til det punkt, at motoren skal udskiftes.
for at drive en Børstet motor påføres jævnspænding over børsterne, som passerer strøm gennem rotorviklingerne for at få motoren til at dreje.
i tilfælde, hvor rotation kun er nødvendig i en retning, og hastighed eller drejningsmoment ikke behøver at styres, kræves der slet ingen drevelektronik til en Børstet motor. I applikationer som denne tændes og slukkes DC-spændingen simpelthen for at få motoren til at køre eller stoppe. Dette er typisk i billige applikationer som motoriseret legetøj. Hvis reversering er nødvendig, kan det opnås ved hjælp af en dobbeltpolet kontakt.
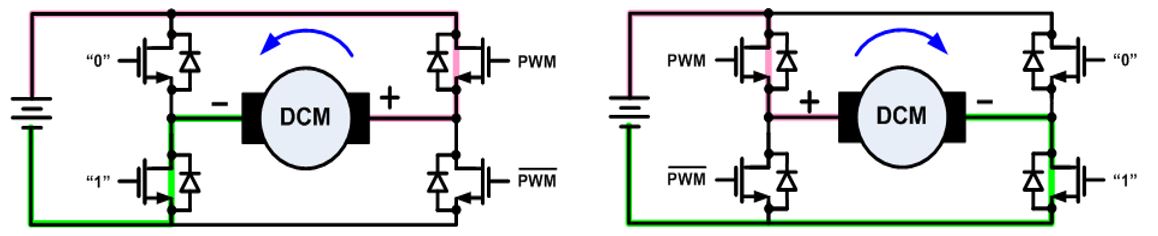
for at lette styringen af hastighed, drejningsmoment og retning bruges en “H-bro” sammensat af elektroniske afbrydere – Transistorer, IGBT ‘er eller MOSFET’ er – til at lade motoren køres i begge retninger. Dette gør det muligt at påføre spændingen på motoren i begge polaritet, hvilket får motoren til at rotere i modsatte retninger. Motorhastigheden eller drejningsmomentet kan styres ved pulsbredde, der modulerer en af kontakterne.
børsteløse DC-motorer
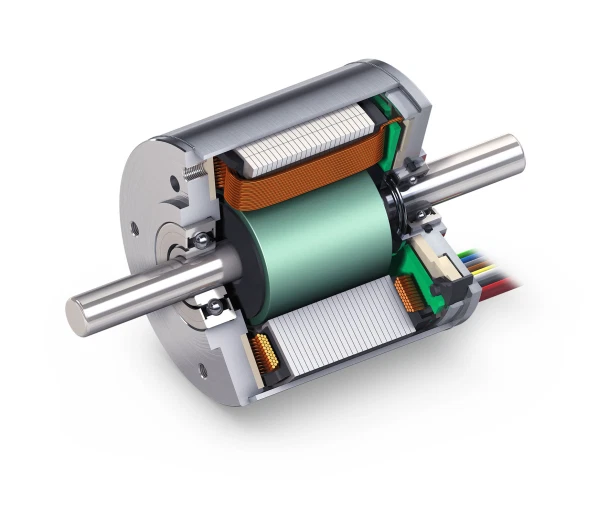
børsteløse DC-motorer (billede af maksongruppe)
børsteløse DC-motorer fungerer efter det samme princip om magnetisk tiltrækning og frastødning som børstemotorer, men de er konstrueret noget anderledes. I stedet for en mekanisk kommutator og børster roteres statorens magnetfelt ved hjælp af elektronisk kommutation. Dette kræver brug af aktiv kontrolelektronik.
i en børsteløs motor har rotoren permanente magneter fastgjort til den, og statoren har viklinger. Børsteløse motorer kan konstrueres med rotoren på indersiden, som vist ovenfor, eller med rotoren på ydersiden af viklingerne (undertiden kaldet en “outrunner” – motor).
antallet af viklinger, der anvendes i en børsteløs motor, kaldes antallet af faser. Selvom børsteløse motorer kan konstrueres med forskellige antal faser, er trefasede børsteløse motorer de mest almindelige. En undtagelse er små køleventilatorer, der kun bruger en eller to faser.
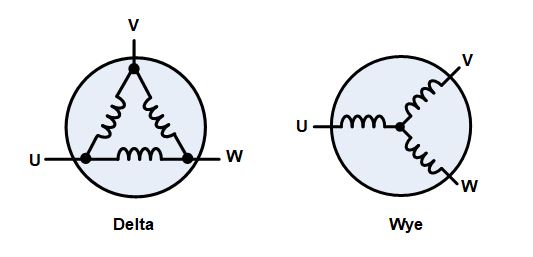
de tre viklinger af en børsteløs motor er forbundet i enten en “stjerne” eller en “delta” konfiguration. I begge tilfælde er der tre ledninger, der forbinder til motoren, og drevteknikken og bølgeformen er identisk.
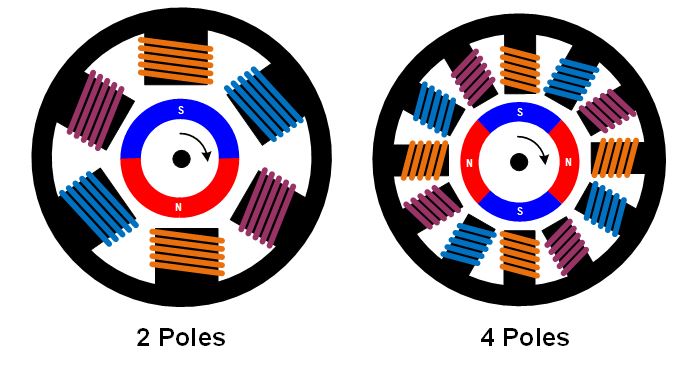
med tre faser kan motorer konstrueres med forskellige magnetiske konfigurationer, kaldet poler. De enkleste 3-fasede motorer har to poler: rotoren har kun et par magnetiske poler, en Nord og en syd. Motorer kan også bygges med flere poler, hvilket kræver flere magnetiske sektioner i rotoren og flere viklinger i statoren. Højere poletællinger kan give højere ydelse, selvom meget høje hastigheder opnås bedre med lavere poletællinger.
for at drive en trefaset børsteløs motor skal hver af de tre faser kunne køres til enten indgangsspændingen eller jorden. For at opnå dette anvendes tre “halvbro” drivkredsløb, der hver består af to kontakter. Kontakterne kan være bipolære Transistorer, IGBT ‘er eller MOSFET’ er, afhængigt af den krævede spænding og strøm.
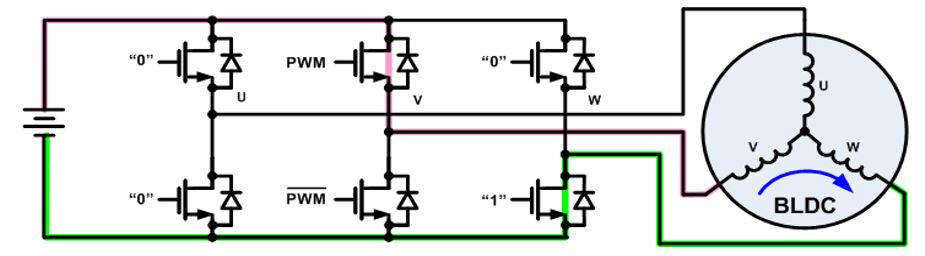
der er en række drivteknikker, der kan anvendes til trefasede børsteløse motorer. Den enkleste kaldes trapesformet, blok eller 120-graders kommutation. Trapesformet kommutation ligner noget den kommutationsmetode, der anvendes i en DC-børstemotor. I denne ordning er en af de tre faser til enhver tid forbundet med jorden, den ene er åben, og den anden drives til forsyningsspændingen. Hvis hastighed eller momentstyring er nødvendig, moduleres normalt den fase, der er tilsluttet forsyningen, pulsbredde. Da faserne skiftes pludseligt ved hvert kommutationspunkt, mens rotorrotationen er konstant, er der en vis variation af drejningsmoment (kaldet momentrippel), når motoren roterer.
for højere ydeevne kan andre kommutationsmetoder anvendes. Sine, eller 180-graders, kommutation driver nuværende grundige alle tre motorfaser hele tiden. Drevelektronikken genererer en sinusformet strøm, selvom hver fase forskydes 120 grader fra den anden. Denne drevteknik minimerer momentrippling såvel som akustisk støj og vibrationer og bruges ofte til drev med høj ydeevne eller høj effektivitet.
for at rotere feltet korrekt skal kontrolelektronikken kende magneternes fysiske position på rotoren i forhold til statoren. Ofte opnås positionsoplysningerne ved hjælp af Hall-sensorer, der er monteret på statoren. Når den magnetiske rotor drejer, opfanger Hall-sensorerne Rotorens magnetfelt. Denne information bruges af drevelektronikken til at føre strøm gennem statorviklingerne i en sekvens, der får rotoren til at dreje.
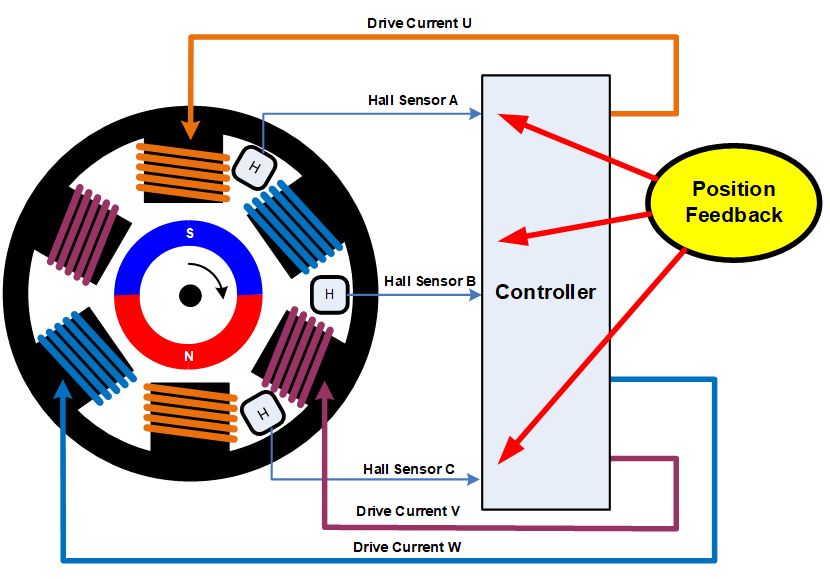
ved hjælp af tre Hall-sensorer kan trapesformet kommutation implementeres med enkel kombinationslogik, så ingen sofistikeret kontrolelektronik er nødvendig. Andre kommutationsmetoder, som sinuskommutation, kræver lidt mere sofistikeret kontrolelektronik og anvender normalt en mikrocontroller.
ud over at give positionsfeedback ved hjælp af Hall-sensorer er der forskellige metoder, der kan bruges til at bestemme rotorpositionen uden sensorer. Det enkleste er at overvåge bagsiden EMF på en udrevet fase for at mærke magnetfeltet i forhold til statoren. En mere sofistikeret kontrolalgoritme, kaldet Feltorienteret kontrol eller FOC, beregner positionen baseret på rotorstrømme og andre parametre. FOC kræver typisk en ret kraftig processor, da der er mange beregninger, der skal udføres meget hurtigt. Dette er selvfølgelig dyrere end en simpel trapesformet kontrolmetode.
børstede og børsteløse motorer: fordele og ulemper
afhængigt af din anvendelse er der grunde til, at du måske vælger at bruge en børsteløs motor over en Børstet motor. Følgende tabel opsummerer de vigtigste fordele og ulemper ved hver motortype:
| Børstet motor | børsteløs motor | |
| levetid | kort (børster slides) | lang (ingen børster at bære) |
| hastighed og Acceleration | Medium | høj |
| effektivitet | Medium | høj |
| elektrisk støj | støjende (buskbue) | stille |
| akustisk støj & Drejningsmoment Ripple | dårlig | Medium (trapesformet) eller god (sinus) |
| omkostninger | laveste | Medium (tilføjet elektronik) |
levetid
som tidligere nævnt er en af ulemperne ved børstede motorer, at der er mekanisk slid på børsterne og kommutatoren. Især kulbørster er ofre, og i mange motorer er de designet til periodisk at blive udskiftet som en del af et vedligeholdelsesprogram. Kommutatorens bløde kobber bæres også langsomt væk af børsterne og når til sidst et punkt, hvor motoren ikke længere fungerer. Da børsteløse motorer ikke har bevægelige kontakter, lider de ikke af dette slid.
hastighed og Acceleration
børstede motorer rotationshastighed kan begrænses af børster og kommutator, samt massen af rotoren. Ved meget høje hastigheder kan børsten til kommutatorkontakten blive uregelmæssig, og børstebue øges. De fleste børstede motorer bruger også en kerne af lamineret jern i rotoren, hvilket giver dem stor rotationsinerti. Dette begrænser motorens accelerations-og decelerationshastighed. Det er muligt at bygge en børsteløs motor med meget kraftige sjældne jordarters magneter på rotoren, hvilket minimerer rotationsinertien. Det øger selvfølgelig omkostningerne.
elektrisk støj
børsterne og kommutatoren danner en slags elektrisk kontakt. Når motoren drejer, åbnes og lukkes kontakterne, mens der strømmer betydelig strøm gennem rotorviklingerne, som er induktive. Dette resulterer i lysbue ved kontakterne. Dette genererer en stor mængde elektrisk støj, som kan kobles til følsomme kredsløb. Lysbue kan mindskes noget ved at tilføje kondensatorer eller RC snubbers over børsterne, men den øjeblikkelige omskiftning af kommutatoren genererer altid en vis elektrisk støj.
akustisk støj
børstede motorer er “hårdt skiftede” – det vil sige, at strømmen pludselig flyttes fra en vikling til en anden. Det genererede drejningsmoment varierer over rotorens rotation, når viklingerne tændes og slukkes. Med en børsteløs motor er det muligt at styre viklingsstrømmene på en måde, der gradvist overgår strømmen fra en vikling til en anden. Dette sænker momentripplen, som er en mekanisk pulsering af energi på rotoren. Drejningsmoment ripple forårsager vibrationer og mekanisk støj, især ved lave rotorhastigheder.
omkostninger
da børsteløse motorer kræver mere sofistikeret elektronik, er de samlede omkostninger ved et børsteløst drev højere end en børstemotor. Selvom en børsteløs motor er enklere at fremstille end en Børstet motor, da den mangler børster og en kommutator, er børstet motorteknologi meget moden, og produktionsomkostningerne er lave. Dette ændrer sig, da børsteløse motorer bliver mere populære, især i applikationer med højt volumen som bilmotorer. Også omkostningerne ved elektronik, som mikrocontrollere, fortsætter med at falde, hvilket gør børsteløse motorer mere attraktive.
Resume
på grund af faldende omkostninger og bedre ydelse vinder børsteløse motorer popularitet i mange applikationer. Men der er stadig steder, hvor børstede motorer giver mere mening.
meget kan læres ved at se på vedtagelsen af børsteløse motorer i biler. Fra og med 2020 er de fleste motorer, der kører, når bilen kører – ting som pumper og ventilatorer – flyttet fra børstede motorer til børsteløse motorer for deres øgede pålidelighed. De ekstra omkostninger ved motoren og elektronikken udgør mere end den lavere hastighed af feltfejl og nedsatte vedligeholdelseskrav.
på den anden side er motorer, der drives sjældent – for eksempel motorer, der bevæger elsæder og elvinduer – forblevet overvejende børstemotorer. Ræsonnementet er, at den samlede køretid i bilens levetid er meget lille, og det er meget usandsynligt, at motorerne vil svigte i løbet af bilens levetid.
da omkostningerne ved børsteløse motorer og deres tilhørende elektronik fortsætter med at falde, finder børsteløse motorer vej ind i applikationer, der traditionelt har været afholdt af børstede motorer. Som et andet eksempel fra bilindustrien har sædejusteringsmotorer i high end card vedtaget børsteløse motorer, fordi de genererer mindre akustisk støj.
få teknisk support