Skibsstabilisatorer og stabiliseringssystemer
et skib til søs har seks frihedsgrader, dvs.
1. Rulle, 2. Heave, 3. Plads, 4. Gab, 5. Svaj, 6. Stigning.
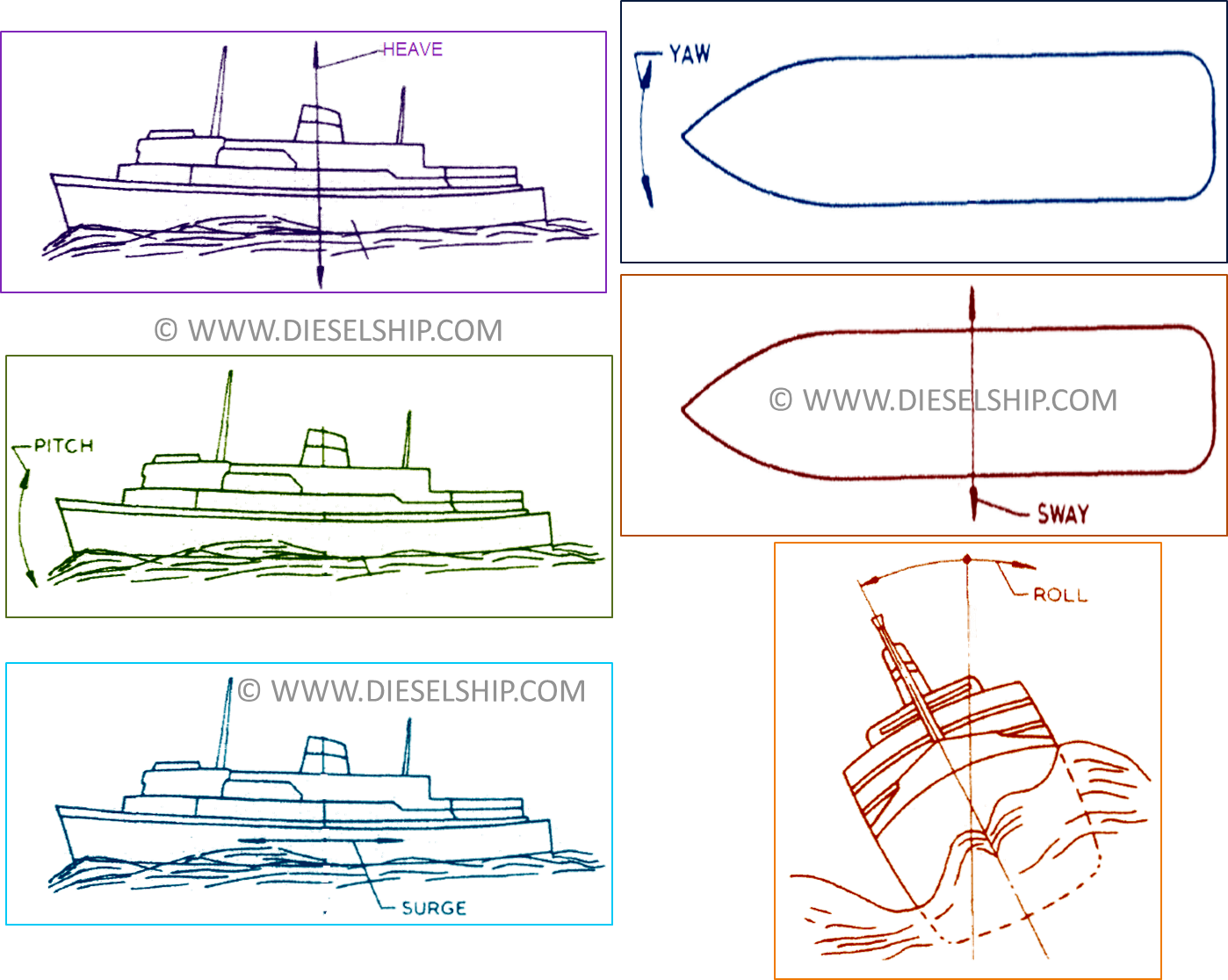
– af alle disse bevægelser kan kun rullende bevægelse effektivt reduceres i praksis ved at montere lænsekøl, antirulletanke eller stabilisatorer.
– et stabiliserende system er monteret på et skib for at reducere rullebevægelsen. Dette opnås ved at tilvejebringe en modsat kraft til den bevægelse, der forsøger at rulle skibet.
– der anvendes to grundlæggende stabiliseringssystemer på skibe;
- finstabilisatorerne
- tankstabiliserende system.
Fin stabilisatorer
Grundlæggende betjening:
har du nogensinde prøvet dette, mens du rejser i en bil??
Åbn vinduesskærmen, og sæt dig uddele alle dine figurer sammen mod fremadgående retning med håndfladen mod vejen, mens bilen er i fremadgående bevægelse med en vis hastighed, og sørg for, at dine fingre er lige.
på denne betingelse vil din hånd forblive lige, og du vil ikke stå over for nogen kraft over eller under dine fingre.
1. Løft nu fingrene lidt opad, og du vil se, at der er en lift under dine fingre, og din hånd vil have en tendens til at gå opad, dette kaldes som en ‘lift’.
2. Læg nu alle dine fingre nedad du vil se, at der er en løfteskubkraft oven på din hånd, og din hånd vil have en tendens til at gå nedad dette kaldes en ‘skub’ eller ‘nedadgående løft’
3. Sænk nu bilen og reducer hastigheden, og gentag ovenstående trin, du vil se, at løft og skubkraft reduceres betydeligt, hvilket betyder, at trækhastigheden er vigtigere for at have en god løft eller et skub.
ovenstående teknik forklarer dig simpelthen det grundlæggende ved træk, positiv løft og negativ løft af en aero folie eller Hydrofoil finner, der bruges på skibe.
Finstabilisatorer
– finnernes stabiliserende kraft genereres af deres bevægelse gennem havet (trækstyrke) og løft’ skabt af vandstrømmen over og under ‘aerofoil’ eller hydrofoil form.
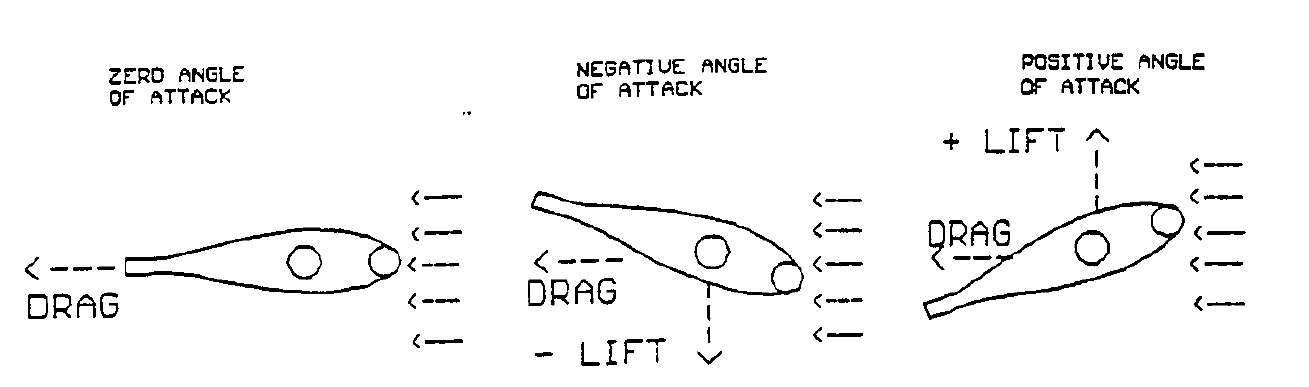
nul angrebsvinkel:
– når der ikke er nogen rullende bevægelse af skibet, forbliver finnerne i 0o vinkel, og der tilbydes ingen løft eller Skubkraft til finnerne som vist i figuren ovenfor.
negativ & positiv angrebsvinkel:
– så snart skibet begynder at rulle, hvilket registreres af sensorerne, for eksempel sige, at skibet ruller fra stabil tilstand til havnesiden, vippes havnefinnen opad (negativ angrebsvinkel), der oplever negativ løft, dvs.finnen oplever en løft fra bunden eller et skub fra bunden. Denne Kraft løfter skibets bagbord side for at annullere den rullende bevægelse til bagbord, og på samme tid vippes styrbordsfinnen ned (positiv angrebsvinkel), og derfor oplever skibet et træk mod styrbordssiden summen af disse to kræfter modvirker bølge-eller vindstyrken, der har tendens til at vippe skibet til bagbord side.
– nu har skibet en tendens til at rulle til styrbordssiden, og ovenstående handling vendes simpelthen for at tilbyde et skub på styrbordssiden og et træk på bagbordssiden.
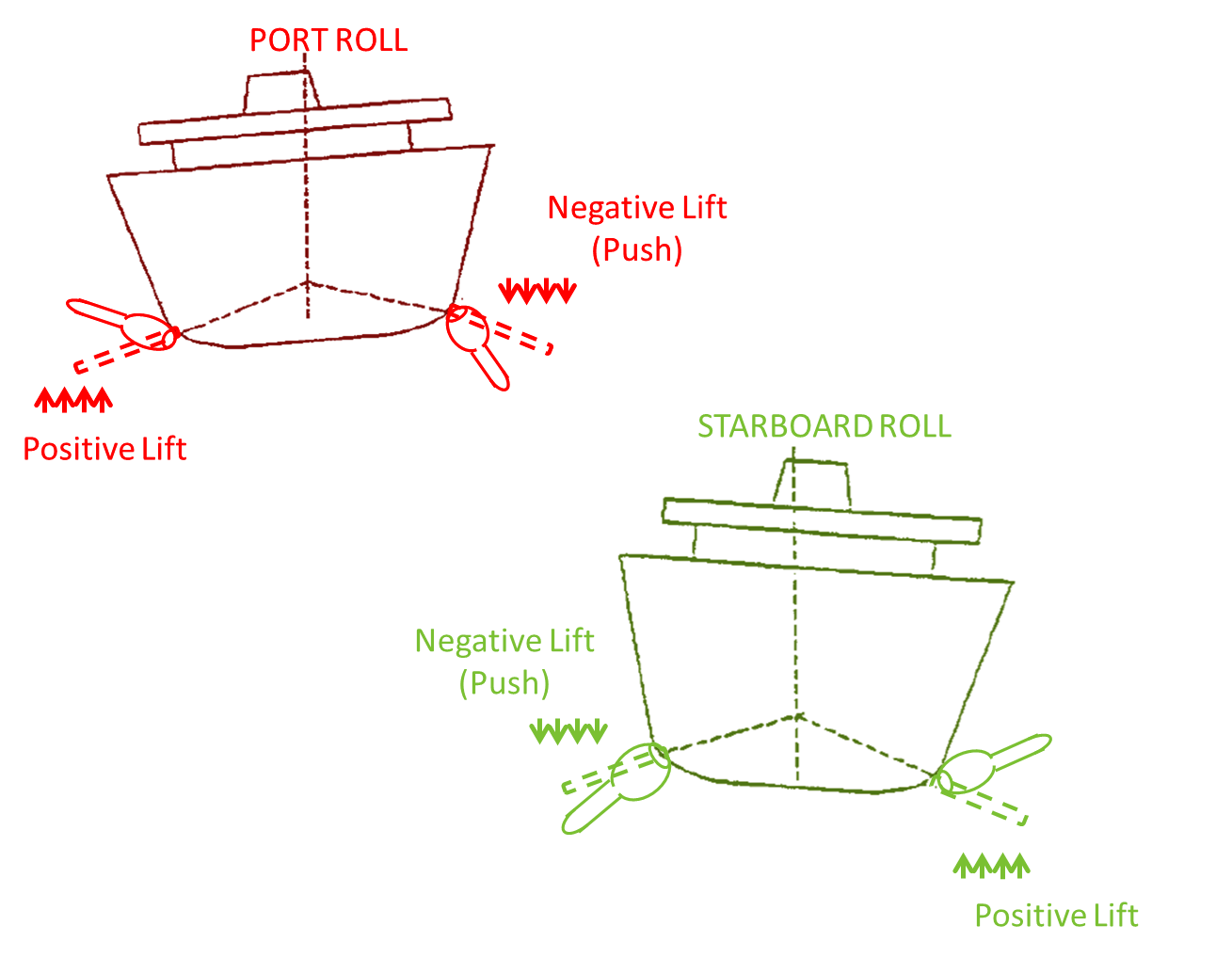
– når forkanten af finnen vippes op, producerer vandstrøm over toppen af profilen løft på grund af et trykfald, mens et løftetryk tilvejebringes ved strømning langs undersiden. Nedadgående hældning af den forreste kant af finnen, inverterer effekten, således at der sker et fald i tryk på undersiden og øget tryk øverst for at give en nedadgående kraft.
– uden en rimelig hastighed for fremadgående bevægelse (træk) af skibet er finnerne ineffektive. Således er disse slags aktive finstabilisatorer monteret på de hurtigere skibstyper, der opererer med måske femten eller flere knob.
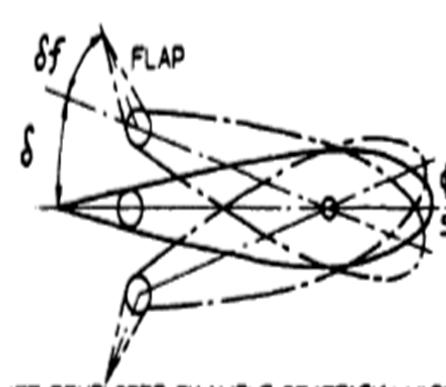
Type finner
– hydrofoilsektionen kan være bevægelig, med eller uden klapper eller delvis fast, delvis bevægelig, disse finner vippes, normalt hydraulisk, i fase med rullen ved lange bølgeperioder, 90 liter ude af fase ved resonans og i fase med rulleacceleration i korte perioder.
finner med alle bevægelige overflade
 finner med alle bevægelige overflade med ekstra hale klap
finner med alle bevægelige overflade med ekstra hale klap
finner med fast struktur
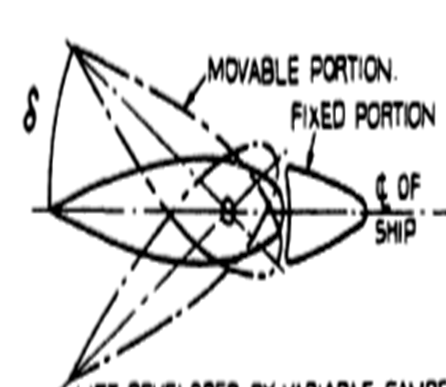
– ikke-udtrækkelige finner bruges ofte, hvor pladsen i skroget er begrænset. De er normalt monteret ved lænsens drejning og rager ikke ud over den lodrette linje fra skibets side eller under den vandrette linje på skibets bund for at minimere risikoen for kontakt med en kajvæg eller havnebunden.
– finskaftet, hvortil finnen er stift fastgjort, passerer gennem en havkirtel i en monteringsplade, der er svejset eller boltet til skroget og understøttes af to væsentlige lejer, en dobbelt-endet håndtag, der er indtastet til den indre ende af finskaftet, aktiveres af hydrauliske væddere, der leveres fra en elektrisk drevet variabel leveringspumpe.
hvordan finbevægelsen styres?
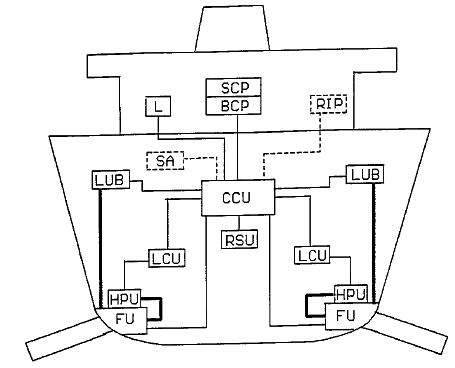
tykkere linjer = hydrauliske linjer; tyndere linjer = elektriske ledninger
SCP = SOLAS Kontrolpanel, BCP = bro Kontrolpanel, L = skibets Log, RIP = Fjernindikatorpanel, SA = skibets automatisering, LUB = Smøreolietank, CCU = Central kontrolenhed, RSU = Rullesensorenhed, LCU = lokal kontrolenhed, HPU = hydraulisk kraftenhed, FU = Finenhed.
– styring af finne bevægelse er automatisk og er normalt afledt af gyroskopisk sensing gear, som i sin enkleste form — hastighedskontrol – er baseret på et lille, elektrisk drevet gyroskop monteret vandret med sin akse på vorteskibe.
– skibets vinkelhastighed får gyroskopet til at behandle mod centraliserende fjedre til en mængde, der er proportional med hastigheden, og det genererer en lille kraft, der forstærkes hydraulisk af en hydraulisk relæenhed for at give strøm, der er tilstrækkelig til at betjene kontrollerne af den variable leveringspumpe via passende kobling.
– en del af koblingen er koblet til finakslen for at transmittere et annulleringssignal til pumpestyringen og for at bringe finnen til hvile i den hældningsvinkel, som føleren kræver.
– denne type kontrol er ofte monteret i små installationer, normalt af økonomiske årsager, og er mest effektiv mod resonantvalsning.
– skibe ruller sjældent i en rent resonant tilstand; havstaten er ofte meget forvirret. Mere detaljerede og dyrere kontrolsystemer er nødvendige for at håndtere pludselig anvendt rulle, rulle i perioder uden resonans og rulle under forhold, der opstår som følge af kombinationen af flere bølgefrekvenser.
– en sensorenhed baseret på et vertikalt holdende gyroskop og et hastighedsgyroskop koblet til differentierings-og summationsenheder gør det muligt at styre finbevægelsen ved hjælp af en sammensat funktion afledt af rullevinkel, rullehastighed og rulleacceleration. Ved at tilføje en ‘naturlig liste’ enhed opnås stabilisering omkring det gennemsnitlige rullepunkt og reducerer således både fremdrift og stabiliserende effektbehov. Dette er kendt som et kompenseret kontrolsystem og bruges generelt i store installationer.
RSU-Roll Sensor enhed i detaljer (kompenseret styresystem)
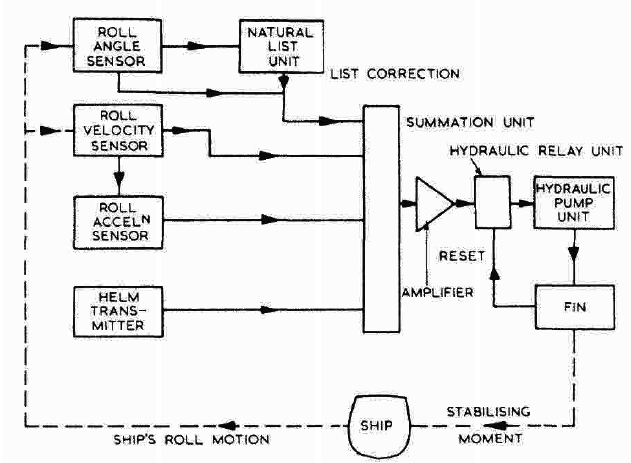 – Rullereduktion på over 90%, typisk 30 liter ud-til-ud reduceret til mindre end 3 liter ud-til-ud, kan opnås ved resonans, og lave restruller kan opretholdes over en lang række frekvenser. Da stabiliseringskraften varierer som kvadratet for skibets hastighed, er finnerne dog mindst effektive ved lav eller nul hastighed, hvor de kun fungerer som ekstra lænsekøl.
– Rullereduktion på over 90%, typisk 30 liter ud-til-ud reduceret til mindre end 3 liter ud-til-ud, kan opnås ved resonans, og lave restruller kan opretholdes over en lang række frekvenser. Da stabiliseringskraften varierer som kvadratet for skibets hastighed, er finnerne dog mindst effektive ved lav eller nul hastighed, hvor de kun fungerer som ekstra lænsekøl.