Modellbeschreibung
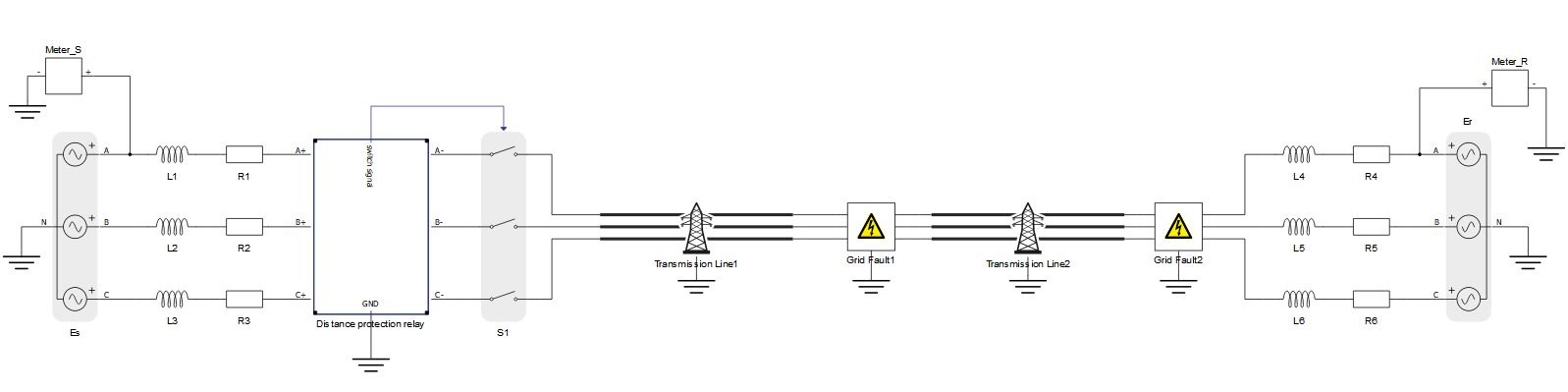
Der elektrische Teil des Modells ist in Abbildung 2 dargestellt.Auf beiden Seiten des Schaltplans befinden sich 3-Phasen-Gitter mit RL-Impedanz. Die Parameter der Gitter sind V = 230 V und f = 60 Hz.Die Netze sind durch eine 100 km lange Übertragungsleitung verbunden. An der Übertragungsleitung befinden sich zwei Fehler: ein 3-phasiger Fehler in der Mitte und ein 1-phasiger Fehler am Ende der Übertragungsleitung.Zwischen dem Gitter auf der linken Seite und der Übertragungsleitung befindet sich ein Abstandsschutzrelais, das das daneben befindliche Schütz steuert.
Abbildung 2: Typhoon HIL schematisches Modell für ein Distanzschutzrelais
Die im Abstandsschutzrelaisblock implementierte Schutzlogik umfasst einen ClosingOpening Difference Operator (CODO)-Algorithmus und eine Fehlererkennung für die Messung, die Eingänge für die Auslöselogik bereitstellt. Dies ist im Detail in Abbildung 3 dargestellt.
Abbildung 3: Schutzalgorithmus für ein Distanzschutzrelais
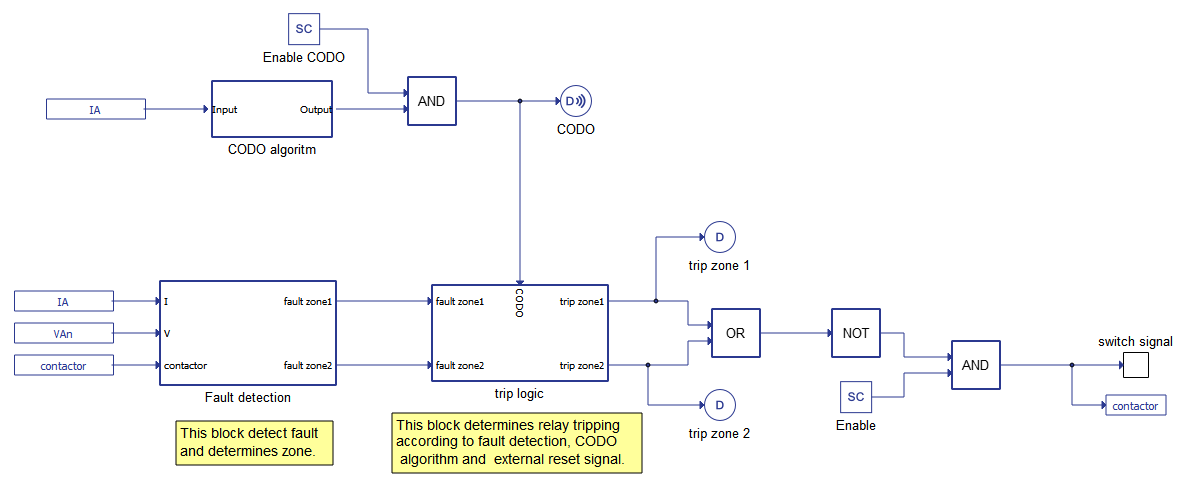
Der Fehlererkennungsblock ist dafür verantwortlich, den Fehler in der Übertragungsleitung zu erkennen und festzustellen, ob sich der Fehler in Zone 1, Zone 2 oder in beiden befindet. Fehlererkennung measuresfault Impedanz nach Spannung und Strom in der Phase a:
Zmeasured= VarmsIarms
whereZmeasuredis impedanz beobachtet durch die relais, whileVarmsandIarmsare die RMS werte von spannung und strom gemessen durch die relais, beziehungsweise.
Jeder Punkt in der komplexen Ebene ist definiert durch die R (x-Achse) und die X (y-Achse) nach folgenden Formeln:
Rmeasured= Zmeasured cos(θV, I)
Xmeasured= Zmeasured sin(θV, I)
womeasuredundxmeasuredsind der Widerstand und reaktanz beobachtet durch die relais, und θV, ICH ist die phase unterschied zwischen strom und spannung.
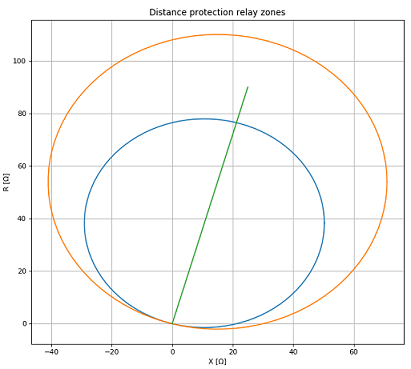
Der Fehlererkennungsblock liefert Fehlersignale an die Fehlerzone 1 und die Fehlerzone 2, abhängig von den gemessenen Werten und Einstellungen für die Zone 2 und den Übertragungsleitungseigenschaften. Auf die Vorschau der Abstandsschutzzonen kann durch Klicken auf die Schaltfläche Vorschau in der in Abbildung 4 gezeigten Komponente Abstandsschutzrelais zugegriffen werden.
Abbildung 4: Vorschau Schutzzonen
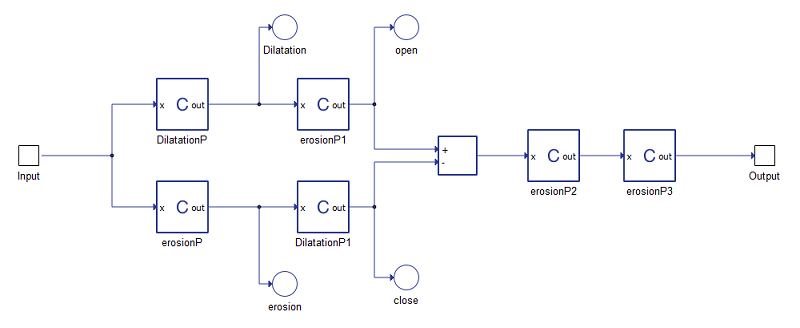
Die Schließen Öffnung Unterschied Betreiber (CODO) algorithmus block enthält C funktion blöcke, die calculatethe fehler filterung signal nach die modell basierend auf mathematische morphologie (MM). MM ist eine nichtlineare signal transformation werkzeug für nicht-periodische transiente signale.Die mathematische Berechnung in MM umfasst nur Addition, Subtraktion, Maximum und Minimum Operationen – geeignet für Echtzeit application.MM umfasst zwei grundlegende Operationen – Dilatation und Erosion. Grundlegende Definitionen von MM-Operatoren sind unten aufgeführt:
Dilatation:
ydn=f ⊕gn=maxf(n-m+gm, n-m∈Df, m ∈GD
Erosion:
yen=f ⊖gn=minf(n+m-gm, n+m∈Df, m ∈GD
Öffnungszeiten:
y0n=f ⊖g⊕g(n)
Finissage:
ycn=f ⊕g⊖g(n)
Der Algorithmus, in dem wir erhalten die CODO-signal wird gebildet mit Gleichungen (4), (5),(6), und (7). Die Realisierung im Modell ist in Abbildung 5 dargestellt.
Abbildung 5: Vorschau Schutzzonen
Schließlich ist der Auslöselogikblock für die Berechnung von Auslösesignalen gemäß dem Fehlererkennungssignal, dem CODO-Algorithmussignal und einem externen Rücksetzsignal verantwortlich.