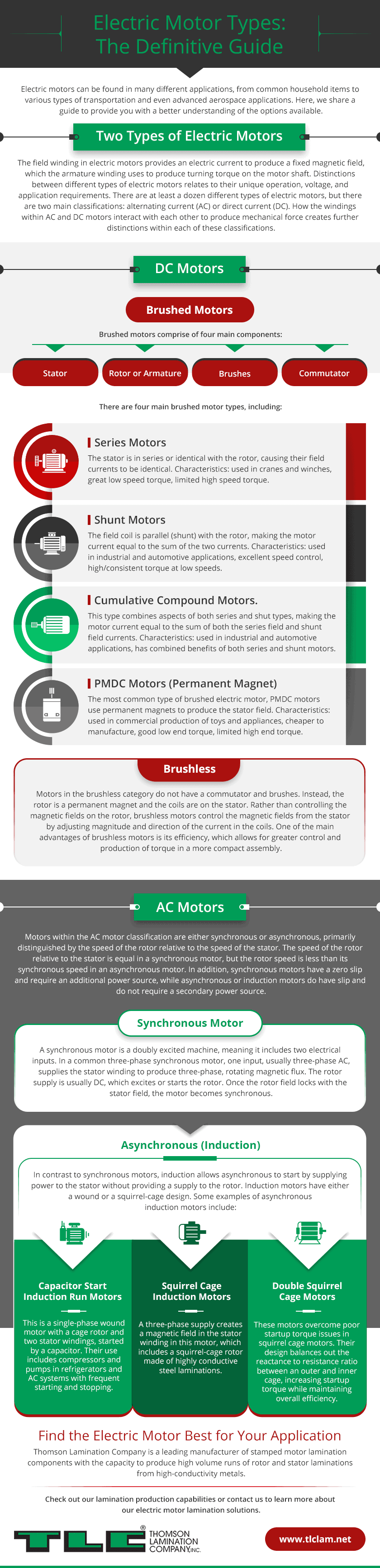
Elektromotoren finden sich in vielen verschiedenen Anwendungen, von gewöhnlichen Haushaltsgegenständen über verschiedene Transportarten bis hin zu fortschrittlichen Luft- und Raumfahrtanwendungen. Hier teilen wir einen Leitfaden, um Ihnen ein besseres Verständnis der verfügbaren Optionen zu vermitteln.
Elektromotoren vs. Generatoren
Sowohl Elektromotoren als auch Generatoren sind elektromagnetische Geräte mit einer Ankerwicklung oder einem Rotor, der sich innerhalb einer Feldwicklung oder eines Stators dreht; sie haben jedoch entgegengesetzte Funktionen. Generatoren wandeln mechanische Energie in elektrische Energie um, während Motoren elektrische Energie in mechanische Energie umwandeln.
Zwei Arten von Elektromotoren
Die Feldwicklung in Elektromotoren liefert einen elektrischen Strom, um ein festes Magnetfeld zu erzeugen, mit dem die Ankerwicklung ein Drehmoment auf der Motorwelle erzeugt. Die Unterscheidung zwischen verschiedenen Arten von Elektromotoren bezieht sich auf ihre einzigartigen Betriebs-, Spannungs- und Anwendungsanforderungen. Es gibt mindestens ein Dutzend verschiedene Arten von Elektromotoren, aber es gibt zwei Hauptklassifikationen: Wechselstrom (AC) oder Gleichstrom (DC). Wie die Wicklungen in AC- und DC-Motoren miteinander interagieren, um mechanische Kraft zu erzeugen, schafft weitere Unterschiede innerhalb jeder dieser Klassifikationen.
Gleichstrommotoren
Bürstenmotoren
Bürstenmotoren bestehen aus vier Hauptkomponenten:
- Stator
- Rotor oder Anker
- Pinsel
- Kommutator
Es sind vier wichtigsten gebürstet motor arten, einschließlich:
- Serie Motoren. Der Stator ist in Reihe oder identisch mit dem Rotor, wodurch ihre Feldströme identisch sind. Eigenschaften: verwendet in kräne und winden, große niedriger geschwindigkeit drehmoment, begrenzte hohe geschwindigkeit drehmoment.
- Nebenschlussmotoren. Die Feldspule ist parallel (Shunt) zum Rotor, wodurch der Motorstrom gleich der Summe der beiden Ströme ist. Eigenschaften: verwendet in industrie und automotive anwendungen, hervorragende speed control, hohe/konsistente drehmoment bei niedrigen geschwindigkeiten.
- Kumulative Verbindung Motoren. Dieser Typ kombiniert Aspekte von Serien- und Shut-Typen, wodurch der Motorstrom gleich der Summe der Serienfeld- und Shuntfeldströme ist. Eigenschaften: verwendet in industrie und automotive anwendungen, hat kombiniert vorteile von sowohl serie und shunt motoren.
- PMDC-Motoren (Permanentmagnet). Die häufigste Art von gebürstetem Elektromotor, PMDC-Motoren verwenden Permanentmagnete, um das Statorfeld zu erzeugen. Eigenschaften: verwendet in kommerziellen produktion von spielzeug und geräte, billiger zu herstellung, gute low-end-drehmoment, begrenzte high-end-drehmoment.
Bürstenlos
Motoren der Kategorie bürstenlos haben keinen Kommutator und keine Bürsten. Stattdessen ist der Rotor ein Permanentmagnet und die Spulen befinden sich am Stator. Anstatt die Magnetfelder am Rotor zu steuern, steuern bürstenlose Motoren die Magnetfelder vom Stator aus, indem sie die Größe und Richtung des Stroms in den Spulen einstellen. Einer der Hauptvorteile von bürstenlosen Motoren ist seine Effizienz, die eine bessere Kontrolle und Erzeugung von Drehmoment in einer kompakteren Baugruppe ermöglicht.
Wechselstrommotoren
Motoren innerhalb der Wechselstrommotorklassifikation sind entweder synchron oder asynchron und unterscheiden sich hauptsächlich durch die Drehzahl des Rotors relativ zur Drehzahl des Stators. Die Drehzahl des Rotors relativ zum Stator ist bei einem Synchronmotor gleich, jedoch ist die Rotordrehzahl kleiner als ihre Synchrondrehzahl bei einem Asynchronmotor. Darüber hinaus haben Synchronmotoren einen Nullschlupf und benötigen eine zusätzliche Stromquelle, während Asynchron- oder Induktionsmotoren Schlupf haben und keine sekundäre Stromquelle benötigen.
Synchronmotor
Ein Synchronmotor ist eine doppelt erregte Maschine, d.h. er enthält zwei elektrische Eingänge. In einem allgemeinen Dreiphasensynchronmotor liefert ein Eingang, normalerweise dreiphasiger Wechselstrom, die Statorwicklung, um einen dreiphasigen rotierenden magnetischen Fluss zu erzeugen. Die Rotorversorgung ist in der Regel Gleichstrom, der den Rotor anregt oder startet. Sobald das Rotorfeld mit dem Statorfeld einrastet, wird der Motor synchron.
Asynchron (Induktion)
Im Gegensatz zu Synchronmotoren ermöglicht die Induktion das Starten von Asynchronmotoren, indem der Stator mit Strom versorgt wird, ohne den Rotor zu versorgen. Induktionsmotoren haben entweder eine gewickelte oder eine Kurzschlusskäfigkonstruktion. Einige Beispiele für asynchrone Induktionsmotoren sind:
- Kondensator Starten Induktion Laufen Motoren. Dies ist ein einphasiger Wickelmotor mit einem Käfigrotor und zwei Statorwicklungen, die von einem Kondensator gestartet werden. Ihr Einsatz umfasst Kompressoren und Pumpen in Kühlschränken und Klimaanlagen mit häufigem Starten und Stoppen.
- Kurzschluss-Induktionsmotoren. Eine dreiphasige Versorgung erzeugt ein Magnetfeld in der Statorwicklung dieses Motors, der einen Kurzschlussläufer aus hochleitfähigen Stahllamellen enthält. Es handelt sich um kostengünstige, wartungsarme und hocheffiziente Motoren, die in Kreiselpumpen, Industrieantrieben, großen Gebläsen und Ventilatoren, Werkzeugmaschinen, Drehmaschinen und anderen Drehgeräten eingesetzt werden.
- Doppel-Käfigläufermotoren. Diese Motoren überwinden schlechte Anlaufmomentprobleme in Käfigläufermotoren. Ihr Design gleicht das Verhältnis von Reaktanz zu Widerstand zwischen einem äußeren und einem inneren Käfig aus und erhöht das Anlaufdrehmoment bei gleichzeitiger Aufrechterhaltung des Gesamtwirkungsgrads.
Identifizierung von Elektromotoren
Die Auswahl des Motors, der für eine bestimmte Anwendung am besten geeignet ist, hängt von der Erfüllung der Anforderungen von vier Merkmalen ab:
- Leistung und Geschwindigkeit
- Motorrahmen
- Spannungsanforderungen
- Gehäuse und Montagepositionen
Ein am Motor angebrachtes Metallschild enthält wichtige Informationen zu diesen Eigenschaften mit Ausnahme der Gehäuseinformationen.
Elektrische Motorleistung & Nenndrehzahl
Sowohl die Nennleistung als auch die Drehzahl (U / min) sollten den Lastanforderungen für die installierte Anwendung entsprechen. Motoren gibt es in verschiedenen PS-Kategorien, einschließlich: bruchmotoren (1/20 HP bis 1 HP), integrale Pferdestärkenmotoren (1 HP bis 400 HP) und große Motoren (100 HP bis 50.000 HP). U / min-Bewertungen umfassen 3600 U / min (2-polig), 1800 U / min (4-polig) und 1200 U / min (6-polig).
Elektromotor Rahmen
Motor rahmen größe nicht zeigen seine leistung werte, vor allem seine ps bewertung. Die National Electrical Manufacturers Association (NEMA) entwarf Rahmennummern, die den Montagegrößen entsprechen, wobei sich ihre Ziffern auf ihre „D“ -Abmessung oder den Abstand von der Mitte der Welle zur Mitte der Unterseite der Halterung beziehen. Im Allgemeinen sind zweistellige Etiketten für fraktionierte Motoren, aber größere PS-Motoren können in ihnen gebaut werden.
Spannung Anforderungen
Spannung, frequenz, und phase sind alle ein teil von spannung anforderungen. In den meisten nordamerikanischen und europäischen Fällen enthalten Drehstrommotoren Zweispannungsanzeigen wie 230/460. Die Standardbetriebsfrequenz für die meisten Elektromotoren beträgt 60 Hz, obwohl 50 Hz-Motoren in Europa üblich sind. Diese Variation in Hertz zeigt an, dass der Motor mit 5/6 seiner normalen Drehzahl arbeitet. Phase ist die letzte Information, die in den Spannungsanforderungen eines Motors enthalten ist und die Art der erforderlichen Versorgung angibt, z. B. dreiphasig, einphasig und Gleichstrom.
Gehäuse und Montagepositionen
Gehäuseinformationen hängen von der Installationsumgebung des Motors ab. Es gibt zwei Hauptkategorien von Gehäusen – offene Motoren und geschlossene Motoren.
Offene Motoren
Anwendungen für offene Motoren umfassen Innenräume, die relativ sauber und trocken sind, was wichtig ist, da offene Motorgehäuse eine Luftzirkulation durch die Wicklungen ermöglichen.
Geschlossene Motoren
Diese Typen erlauben keinen freien Luftaustausch zwischen dem Äußeren und dem Inneren des Motors. Variationen in der Gehäuseluftdichtheit und Kühlfunktionen unterscheiden weiter geschlossene Motortypen, einschließlich:
- Vollständig geschlossen Lüftergekühlt (TEFC)
- Vollständig geschlossen Nicht belüftet (TENV)
- Vollständig geschlossen Luftüber (TEAO)
- Vollständig geschlossen Abwaschen (TEWD)
- Explosionsgeschützte Gehäuse (EXPL)
- Explosionsgefährdeter Bereich (HAZ)
Finden Sie den für Ihre Anwendung am besten geeigneten Elektromotor
Thomson Lamination Company ist ein führender Hersteller von gestanzten Motorlaminierungskomponenten mit der Fähigkeit, Rotor- und Statorbleche aus hochleitfähigen Metallen in großen Stückzahlen herzustellen.
Schauen Sie sich unsere Laminierproduktionskapazitäten an oder kontaktieren Sie uns, um mehr über unsere Laminierlösungen für Elektromotoren zu erfahren.