Schiffsstabilisatoren und Stabilisierungssysteme
Ein Schiff auf See hat sechs Freiheitsgrade, d.h.
1. Rolle, 2. Heben, 3. Stellplatz, 4. Gieren, 5. Sway, 6. Anstieg.
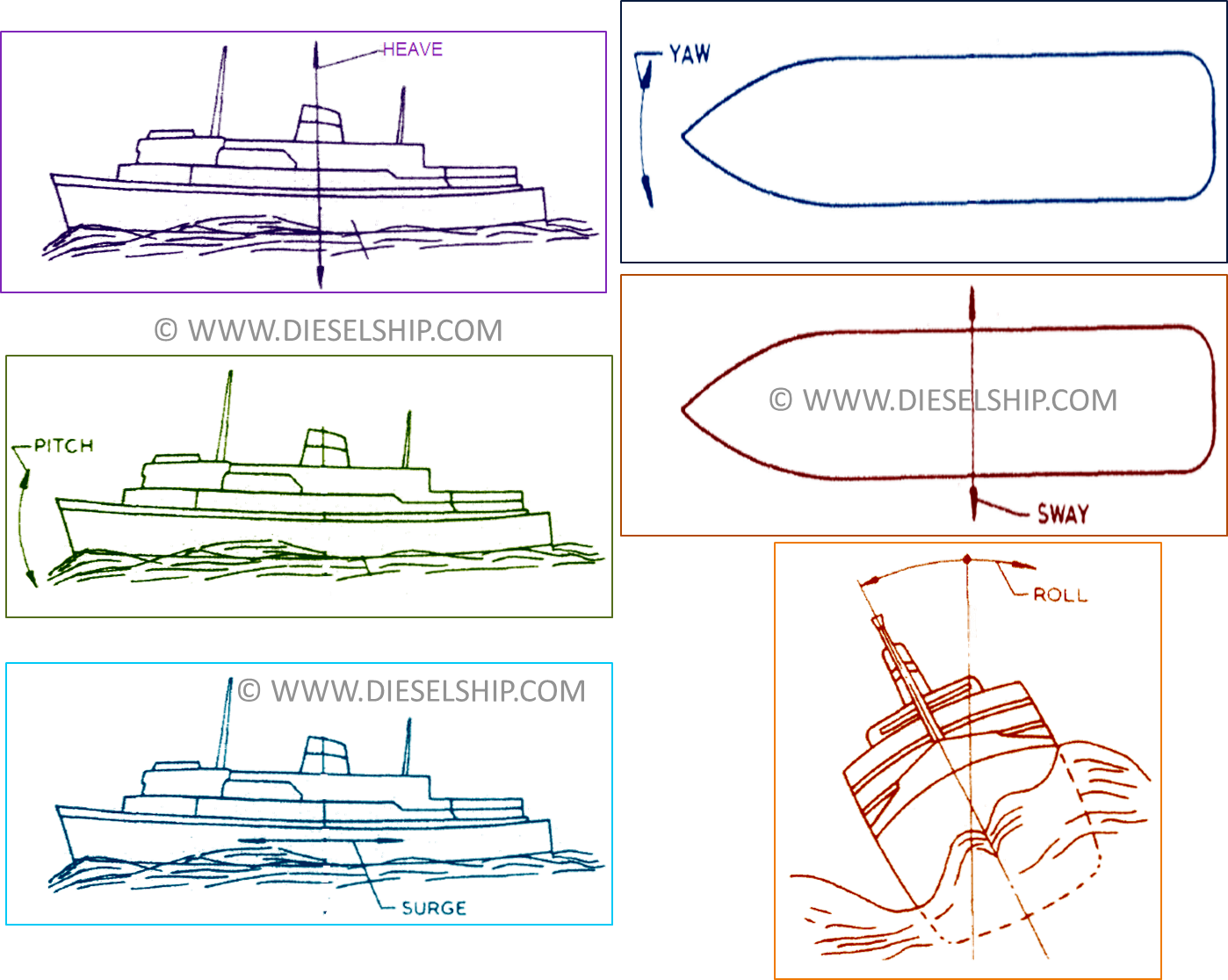
– Von all diesen Bewegungen kann in der Praxis nur die Rollbewegung durch den Einbau von Bilgenkielen, Rollschutztanks oder Stabilisatoren effektiv reduziert werden.
– Ein Stabilisierungssystem wird an einem Schiff angebracht, um die Rollbewegung zu reduzieren. Dies wird erreicht, indem eine entgegengesetzte Kraft zu dieser Bewegung bereitgestellt wird, die versucht, das Schiff zu rollen.
– Auf Schiffen werden zwei grundlegende Stabilisierungssysteme verwendet;
- Die Flossenstabilisatoren
- Tankstabilisierungssystem.
Fin stabilisatoren
Grundlegende Bedienung:
Haben sie jemals versucht diese während sie sind reisen in ein auto??
Öffnen Sie das Fensterschild und verteilen Sie alle Ihre Figuren zusammen in Vorwärtsrichtung, wobei die Handfläche zur Straße zeigt, während sich das Auto mit einiger Geschwindigkeit in Vorwärtsbewegung befindet, und stellen Sie sicher, dass Ihre Finger gerade sind.
In diesem Zustand bleibt Ihre Hand gerade und Sie werden keiner Kraft über oder unter Ihren Fingern ausgesetzt sein.
1. Heben Sie nun Ihre Finger leicht nach oben und Sie werden sehen, dass sich unter Ihren Fingern ein Lift befindet und Ihre Hand dazu neigt, nach oben zu gehen, was als ‚Lift‘ bezeichnet wird.
2. Legen Sie nun alle Ihre Finger nach unten, Sie werden sehen, dass auf Ihrer Hand eine Hebekraft liegt und Ihre Hand dazu neigt, nach unten zu gehen. Dies wird als ‚Drücken‘ oder ‚Abwärtsheben‘ bezeichnet.
3. Sie werden sehen, dass die Hub- und Schubkraft erheblich reduziert ist, was bedeutet, dass die Schleppgeschwindigkeit wichtiger ist, um einen guten Hub oder Schub zu haben.
Die obige Technik erklärt Ihnen einfach die Grundlagen von Widerstand, positivem Auftrieb und negativem Auftrieb einer Aero-Folie oder Tragflügelflossen, die auf Schiffen verwendet werden.
Flossenstabilisatoren
– Die Stabilisierungskraft der Flossen wird durch ihre Bewegung durch das Meer (Widerstandskraft) und den Auftrieb erzeugt, der durch den Wasserfluss über und unter der Tragflächen- oder Tragflächenform erzeugt wird.
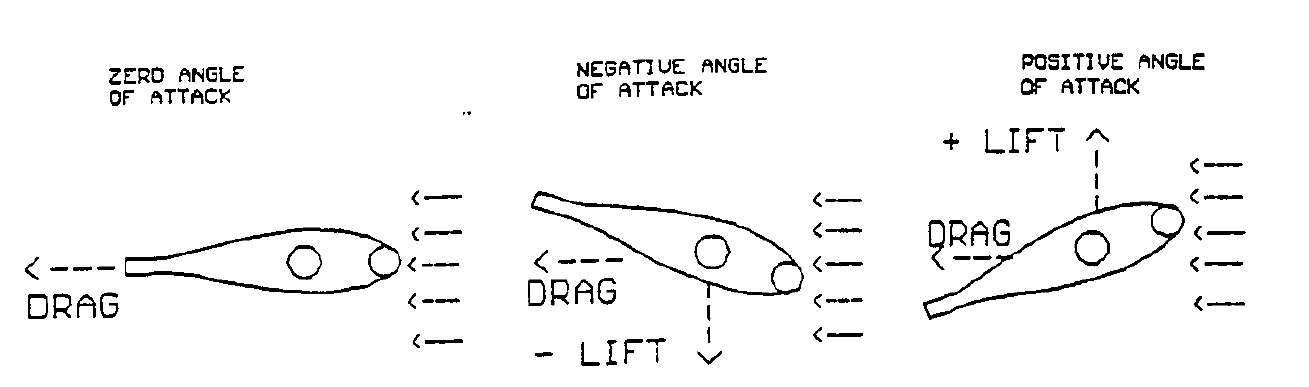
Null Anstellwinkel:
– Wenn keine Rollbewegung des Schiffes stattfindet, bleiben die Flossen im Winkel 0o und es wird keine Hub- oder Schubkraft auf die Flossen ausgeübt, wie in der obigen Abbildung gezeigt.
Negativ & Positiver Anstellwinkel:
– Sobald das Schiff zu rollen beginnt, was von den Sensoren erfasst wird, z. B. wenn das Schiff aus dem stabilen Zustand zur Backbordseite rollt, wird die Backbordflosse nach oben geneigt (negativer Anstellwinkel), die einen negativen Auftrieb erfahren, d. h. Die Flosse erfährt einen Auftrieb von unten oder einen Stoß von unten. Diese Kraft hebt die Backbordseite des Schiffes an, um die Rollbewegung zur Backbordseite aufzuheben, und gleichzeitig wird die Steuerbordflosse nach unten gekippt (positiver Anstellwinkel), und daher erfährt das Schiff einen Zug zur Steuerbordseite.
– Jetzt neigt das Schiff dazu, zur Steuerbordseite zu rollen, und die obige Aktion wird einfach umgekehrt, um einen Schub auf der Steuerbordseite und einen Zug auf der Backbordseite zu bieten.
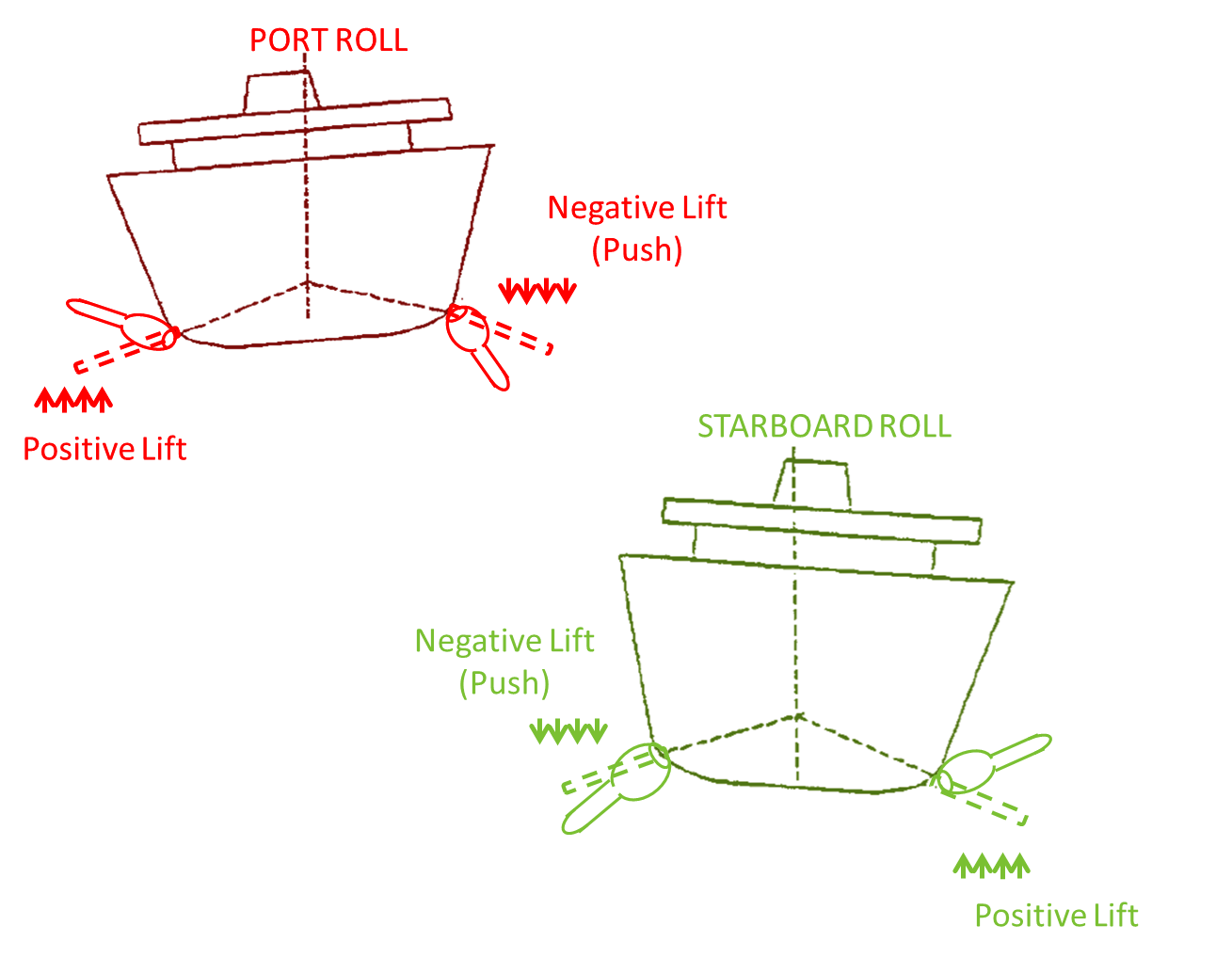
– Wenn die Vorderkante der Flosse nach oben gekippt wird, erzeugt der Wasserfluss über die Oberseite des Profils aufgrund eines Druckabfalls einen Auftrieb, während ein anhebender Druck durch Strömung entlang der Unterseite bereitgestellt wird. Abwärtsneigung der Vorderkante der Flosse, kehrt den Effekt um, so dass ein Druckabfall an der Unterseite und ein erhöhter Druck an der Oberseite auftritt, um eine Abwärtskraft zu erzeugen.
– Ohne eine angemessene Vorwärtsbewegung (Widerstand) des Schiffes sind die Flossen unwirksam. So werden diese Art von aktiven Flossenstabilisatoren an die schnelleren Schiffstypen angepasst, die bei vielleicht fünfzehn oder mehr Knoten arbeiten.
Art der Lamellen
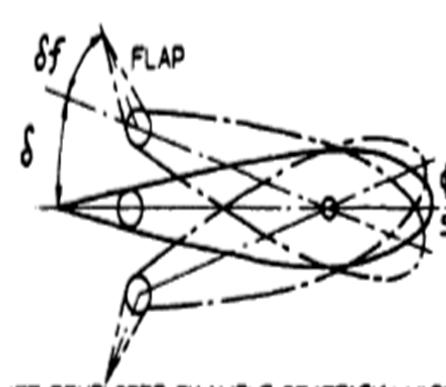
– Das Tragflächenprofil kann vollständig beweglich sein, mit oder ohne Klappen oder teilweise feststehend, teilweise beweglich, Diese Lamellen sind in der Regel hydraulisch in Phase mit der Rolle bei langen Wellenperioden, 90 ° außer Phase bei Resonanz und in Phase mit Rollbeschleunigung bei kurzen Perioden geneigt.
Flossen mit allen beweglichen Flächen
 Flossen mit allen beweglichen Flächen mit zusätzlicher Heckklappe
Flossen mit allen beweglichen Flächen mit zusätzlicher Heckklappe
Flossen mit fester Struktur
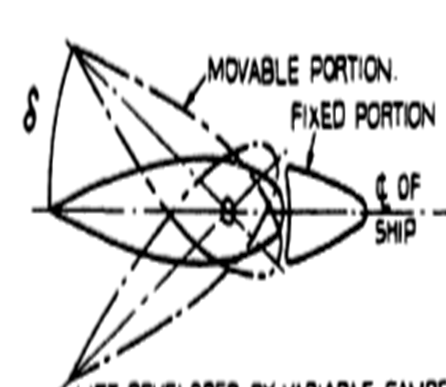
– Nicht einziehbare Flossen werden häufig verwendet, wenn der Platz innerhalb des Rumpfes begrenzt ist. Sie werden normalerweise an der Bilgenwende angebracht und ragen nicht über die vertikale Linie von der Schiffsseite oder unter die horizontale Linie des Schiffsbodens hinaus, um das Risiko eines Kontakts mit einer Kaimauer oder dem Dockboden zu minimieren.
– Die Flossenwelle, an der die Flosse starr befestigt ist, verläuft durch eine mit dem Rumpf verschweißte oder verschraubte Montageplatte und wird von zwei wesentlichen Lagern getragen, Ein doppelseitiger Hebel, der mit dem inneren Ende der Flossenwelle verbunden ist, wird von Hydraulikstößeln betätigt, die von einer elektrisch angetriebenen variablen Förderpumpe gespeist werden.
Wie wird die Flossenbewegung gesteuert?
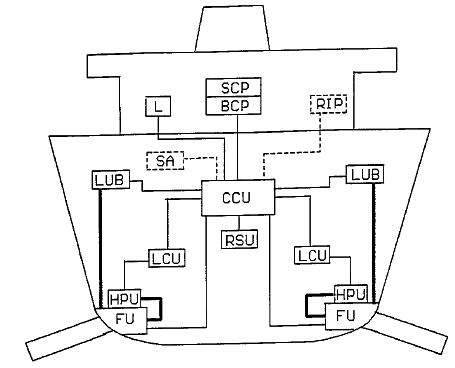
Dickere Leitungen = Hydraulikleitungen; Dünnere Leitungen = Elektrische Leitungen
SCP = SOLAS-Bedienfeld, BCP = Brückensteuerpult, L = Schiffsprotokoll, RIP = Fernanzeigetafel, SA = Schiffsautomatisierung, LUB = Schmieröltank, CCU = Zentrale Steuereinheit, RSU = Rollsensoreinheit, LCU = Lokale Steuereinheit, HPU = Hydraulikaggregat, FU = Flosseneinheit.
– Die Steuerung der Flossenbewegung erfolgt automatisch und wird normalerweise von einem gyroskopischen Sensorgetriebe abgeleitet, das in seiner einfachsten Form — der Geschwindigkeitssteuerung – auf einem kleinen, elektrisch angetriebenen Gyroskop basiert, das horizontal mit seiner Achse seitlich montiert ist.
– Die Winkelgeschwindigkeit der Rolle des Schiffes bewirkt, dass das Gyroskop gegen zentralisierende Federn zu einem Betrag proportional zur Geschwindigkeit verarbeitet und es erzeugt eine kleine Kraft, die hydraulisch durch eine hydraulische Relaiseinheit verstärkt wird, um eine ausreichende Leistung bereitzustellen, um die Steuerungen der variablen Förderpumpe über ein geeignetes Gestänge zu betreiben.
– Ein Teil des Gestänges ist mit der Lamellenwelle gekoppelt, um ein Steuersignal an die Pumpensteuerung zu senden und die Lamelle in dem von der Sensoreinheit geforderten Neigungswinkel zur Ruhe zu bringen.
– Diese Art der Steuerung wird oft in kleinen Anlagen eingebaut, in der Regel aus wirtschaftlichen Gründen, und ist am effektivsten gegen Resonanzwalzen.
– Schiffe rollen selten in einem rein resonanten Modus; Der Seegang ist oft sehr verwirrt. Aufwändigere und teurere Steuerungssysteme sind erforderlich, um mit plötzlich aufgetragenem Walzen, Walzen in Resonanzperioden und Walzen unter Bedingungen umzugehen, die sich aus der Kombination mehrerer Wellenfrequenzen ergeben.
– Eine Erfassungseinheit, die auf einem vertikalhaltenden Gyroskop und einem Geschwindigkeitskreisel basiert, die in Differenzierungs- und Summationseinheiten gekoppelt sind, ermöglicht die Steuerung der Flossenbewegung durch eine zusammengesetzte Funktion, die aus Rollwinkel, Rollgeschwindigkeit und Rollbeschleunigung abgeleitet ist. Durch Hinzufügen einer ‚Natural List‘ -Einheit wird eine Stabilisierung um den mittleren Wankpunkt erreicht, wodurch sowohl der Vortrieb als auch der stabilisierende Leistungsbedarf reduziert werden. Dies ist als kompensiertes Steuerungssystem bekannt und wird im Allgemeinen in großen Installationen verwendet.
RSU – Rollsensoreinheit im Detail (Kompensierte Steuerung)
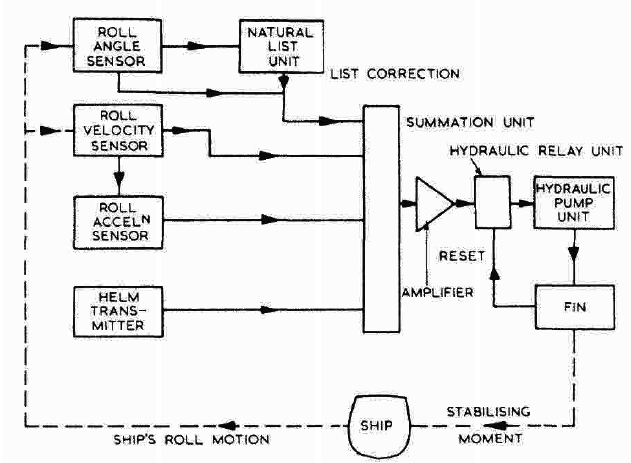 – Eine Walzenreduzierung von mehr als 90%, typischerweise 30 ° von außen nach außen auf weniger als 3 ° von außen nach außen, kann bei Resonanz erreicht werden, und niedrige Restwalzen können über einen weiten Frequenzbereich aufrechterhalten werden. Da jedoch die Stabilisierungskraft als Quadrat der Schiffsgeschwindigkeit variiert, sind Flossen bei niedriger oder Null Geschwindigkeit am wenigsten wirksam, wo sie nur als zusätzliche Bilgenkiele fungieren.
– Eine Walzenreduzierung von mehr als 90%, typischerweise 30 ° von außen nach außen auf weniger als 3 ° von außen nach außen, kann bei Resonanz erreicht werden, und niedrige Restwalzen können über einen weiten Frequenzbereich aufrechterhalten werden. Da jedoch die Stabilisierungskraft als Quadrat der Schiffsgeschwindigkeit variiert, sind Flossen bei niedriger oder Null Geschwindigkeit am wenigsten wirksam, wo sie nur als zusätzliche Bilgenkiele fungieren.