Estabilizadores y sistemas de estabilización de buques
Un buque en el mar tiene seis grados de libertad, es decir,
1. Rueda, 2. Tirón, 3. Lanzamiento, 4. Guiñada, 5. Balancéate, 6. Oleada.
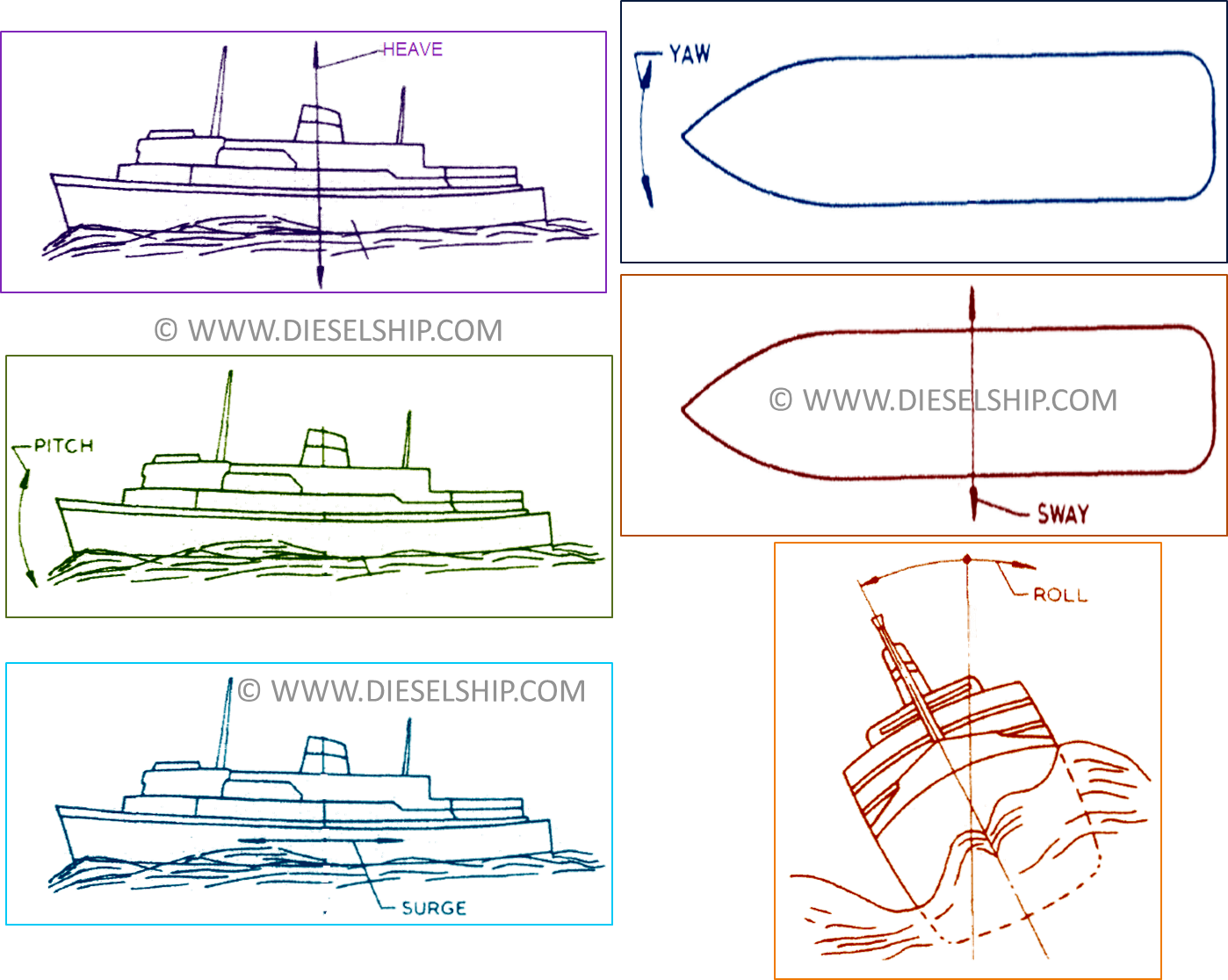
– De todos estos movimientos, solo el movimiento de rodadura se puede reducir de manera efectiva en la práctica mediante el montaje de quillas de sentina, tanques antivuelco o estabilizadores.
– Se instala en un buque un sistema de estabilización para reducir el movimiento de rodadura. Esto se logra proporcionando una fuerza opuesta a ese movimiento que intenta hacer rodar la nave.
– Hay dos sistemas básicos de estabilización utilizados en los buques;
- Los estabilizadores de aletas
- Sistema de estabilización de tanques.
Estabilizadores de aletas
Funcionamiento básico:
¿Alguna vez ha probado esto mientras viaja en un automóvil??
Abra el protector de la ventana y coloque todas sus figuras juntas mirando hacia adelante con la palma hacia la carretera mientras el automóvil está en movimiento hacia adelante a cierta velocidad y asegúrese de que sus dedos estén rectos.
En esta condición, su mano permanecerá recta y no enfrentará ninguna fuerza por encima o por debajo de sus dedos, esto simplemente se llama «Arrastre».
1. Ahora levante ligeramente los dedos hacia arriba y verá que hay un levantamiento debajo de los dedos y su mano tenderá a ir hacia arriba, lo que se llama «levantamiento».
2. Ahora ponga todos sus dedos hacia abajo verá que hay una fuerza de empuje de elevación en la parte superior de su mano y su mano tenderá a ir hacia abajo, esto se llama «empuje» o «elevación hacia abajo»
3. Ahora reduzca la velocidad del automóvil y reduzca la velocidad y repita los pasos anteriores, verá que la fuerza de elevación y empuje se reduce considerablemente, lo que significa que la velocidad de arrastre es más importante para tener una buena elevación o un empuje.
La técnica anterior simplemente le explica la base de Arrastre, Elevación Positiva y Elevación Negativa de una lámina aerodinámica o aletas de hidroplano que se utilizan en los barcos.
Estabilizadores de aletas
– El poder estabilizador de las aletas se genera por su movimiento a través del mar (Fuerza de arrastre) y elevación’ creada por el flujo de agua por encima y por debajo de la forma de ‘perfil aerodinámico’ o hidrofilo.
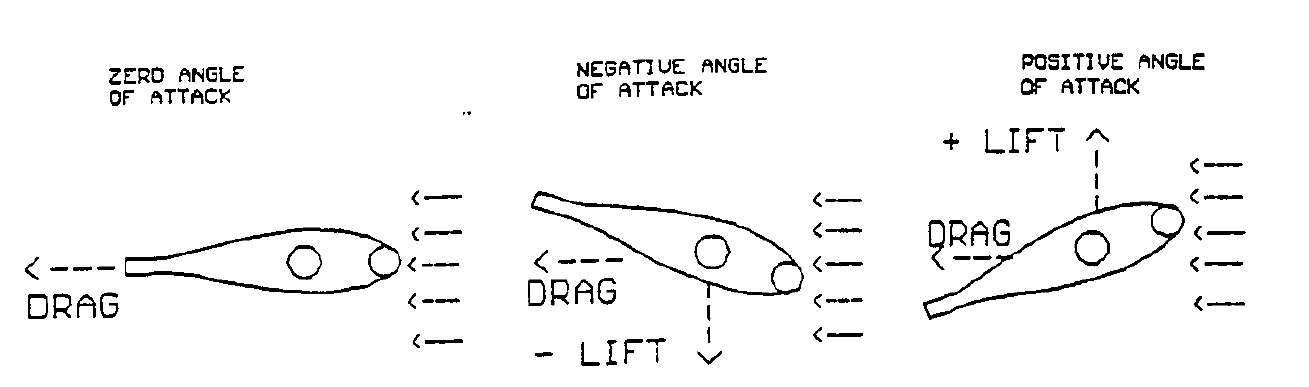
Ángulo de ataque cero:
– Cuando no hay ningún movimiento de balanceo de la nave, las aletas permanecen en un ángulo de 0o y no se ofrece fuerza de elevación o empuje a las aletas como se muestra en la figura anterior.
Negativo & Ángulo de Ataque Positivo:
– Tan pronto como el barco comienza a rodar que es detectado por los sensores, por ejemplo, digamos que el barco rueda desde una condición estable hasta el lado de babor, la aleta de babor se inclina hacia arriba (Ángulo de ataque Negativo) que experimenta una elevación negativa, es decir, la aleta experimenta una elevación desde el fondo o un empuje desde el fondo. Esta fuerza levanta el lado de babor del barco para cancelar el movimiento de rodadura hacia el lado de babor y, al mismo tiempo, la aleta de estribor se inclina hacia abajo (Ángulo de ataque Positivo) y, por lo tanto, el barco experimenta un tirón hacia el lado de estribor.la suma de estas dos fuerzas contrarresta la fuerza de las olas o del viento que tiende a inclinar el barco hacia el lado de babor.
– Ahora, el barco tiende a rodar hacia el lado de estribor y la acción anterior simplemente se invierte para ofrecer un empuje en el lado de estribor y un tirón en el lado de babor.
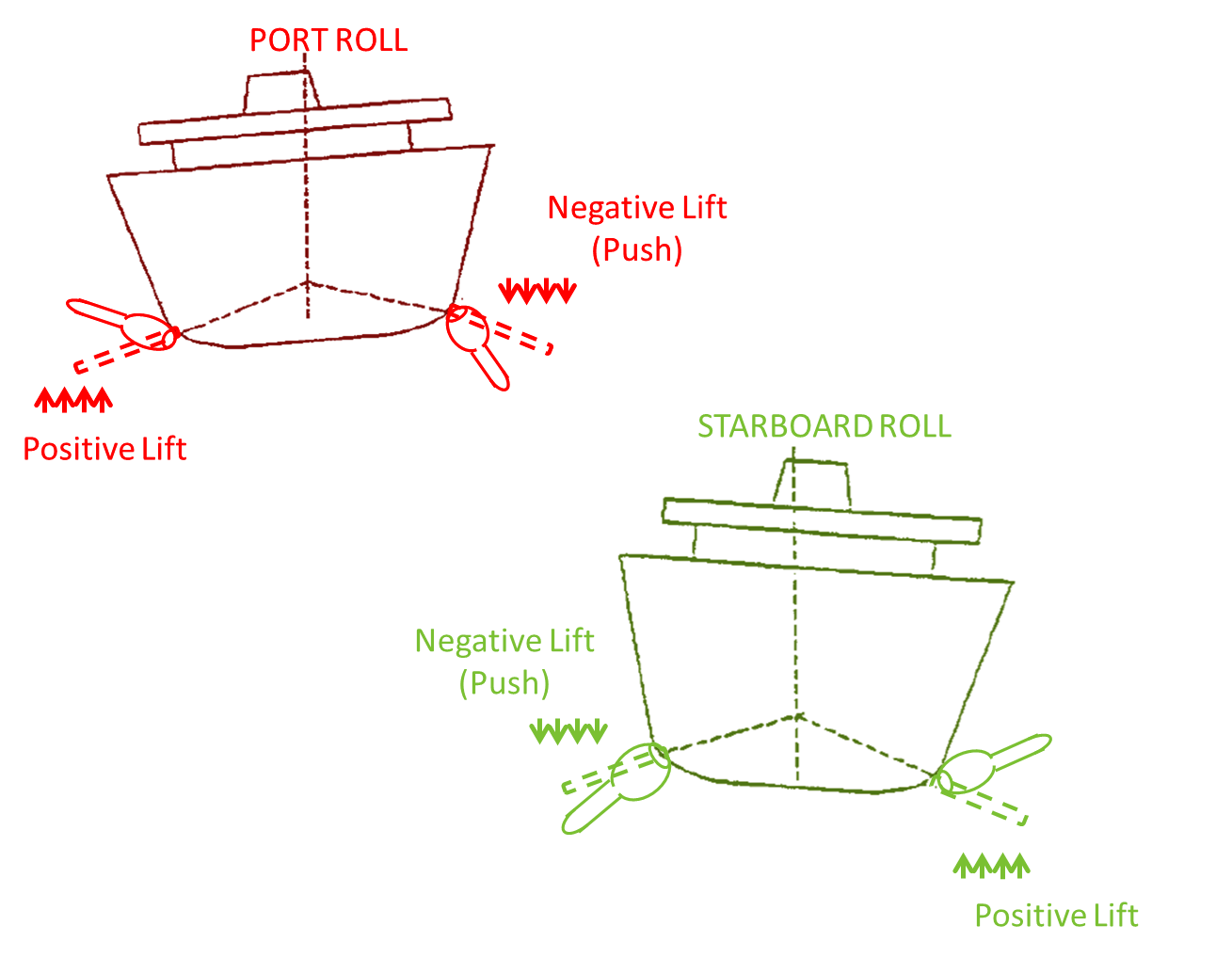
– Cuando el borde frontal de la aleta está inclinado hacia arriba, el flujo de agua a través de la parte superior del perfil produce elevación debido a una caída de presión, mientras que el flujo a lo largo de la parte inferior proporciona una presión de elevación. La inclinación hacia abajo del borde delantero de la aleta invierte el efecto, de modo que se produce una caída de presión en la parte inferior y un aumento de la presión en la parte superior para dar una fuerza hacia abajo.
– Sin una velocidad razonable de movimiento hacia adelante (Arrastre) del barco, las aletas son ineficaces. Por lo tanto, este tipo de estabilizadores de aletas activos se instalan en los tipos de buques más rápidos, que operan a unos quince nudos o más.
Tipo de Aletas
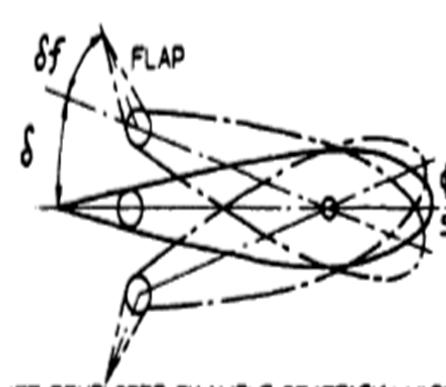
– La sección del hidroplano puede ser totalmente móvil, con o sin aletas o parcialmente fija, parcialmente móvil, Estas aletas están inclinadas, generalmente hidráulicamente, en fase con el rodillo en períodos de onda larga, 90° fuera de fase en resonancia y en fase con aceleración del rodillo en períodos cortos.
Aletas con toda la superficie móvil
 Aletas con toda la superficie móvil con solapa de cola adicional
Aletas con toda la superficie móvil con solapa de cola adicional
Aletas con estructura fija
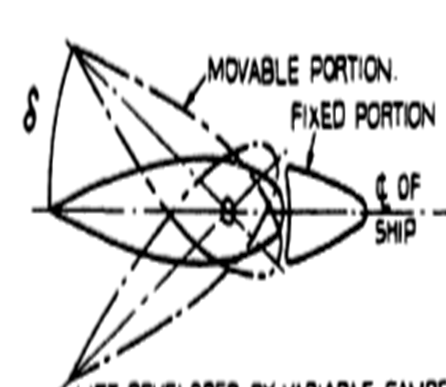
– Las aletas no retráctiles se usan comúnmente cuando el espacio dentro del casco es limitado. Por lo general, se instalan en el giro de la sentina y no se proyectan más allá de la línea vertical desde el costado del buque ni por debajo de la línea horizontal del fondo del buque, para minimizar el riesgo de contacto con la pared de un muelle o el fondo del muelle.
– El eje de la aleta, al que la aleta está unida rígidamente, pasa a través de una glándula de mar en una placa de montaje soldada o atornillada al casco y está soportado por dos rodamientos sustanciales, una palanca de doble extremo con llave en el extremo interno del eje de la aleta es accionada por arietes hidráulicos suministrados desde una bomba de suministro variable accionada eléctricamente.
¿Cómo se controla el movimiento de las aletas?
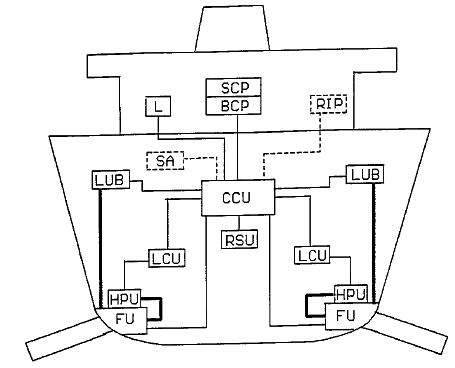
Líneas más Gruesas = Líneas Hidráulicas; Líneas Más Delgadas = Líneas Eléctricas
SCP = Panel de control SOLAS, BCP = Panel de Control de Puente, L = Bitácora del Barco , RIP = Panel Indicador Remoto, SA = Automatización del Barco , LUB = Tanque de Aceite Lubricante, CCU = Unidad de Control Central, RSU = Unidad de sensor de rodillo, LCU = Unidad de Control Local, HPU = Unidad de Potencia Hidráulica, FU = Unidad de Aletas.
– El control del movimiento de las aletas es automático y generalmente se deriva de un dispositivo de detección giroscópico que, en su forma más simple, el control de velocidad, se basa en un pequeño giroscopio accionado eléctricamente montado horizontalmente con su eje en las naves.
– La velocidad angular de giro de la nave hace que el giroscopio se procese contra resortes centralizantes a una cantidad proporcional a la velocidad y genera una pequeña fuerza que es amplificada hidráulicamente por una unidad de relé hidráulico para proporcionar energía suficiente para operar los controles de la bomba de suministro variable a través de un acoplamiento adecuado.
– Parte del acoplamiento está acoplado al eje de la aleta para transmitir una señal de cancelación al control de la bomba y hacer que la aleta descanse en el ángulo de inclinación exigido por la unidad de detección.
– Este tipo de control a menudo se instala en instalaciones pequeñas, generalmente por razones económicas, y es más efectivo contra el balanceo resonante.
– Los barcos rara vez ruedan en un modo puramente resonante; el estado del mar a menudo es muy confuso. Se requieren sistemas de control más elaborados y más caros para hacer frente a la rotación súbitamente aplicada, rodando en períodos de resonancia y rodando en condiciones que surgen de la combinación de varias frecuencias de onda.
– Una unidad de detección basada en un giroscopio de retención vertical y un giroscopio de velocidad acoplados en unidades de diferenciación y suma permite controlar el movimiento de las aletas mediante una función compuesta derivada del ángulo de giro, la velocidad de giro y la aceleración de giro. Al agregar una unidad de «lista natural», se logra la estabilización sobre el punto medio de giro y, por lo tanto, reduce la demanda de potencia de propulsión y estabilización. Esto se conoce como sistema de control compensado y se utiliza generalmente en grandes instalaciones.
Unidad de sensor de rodillo RSU en detalle (Sistema de control compensado)
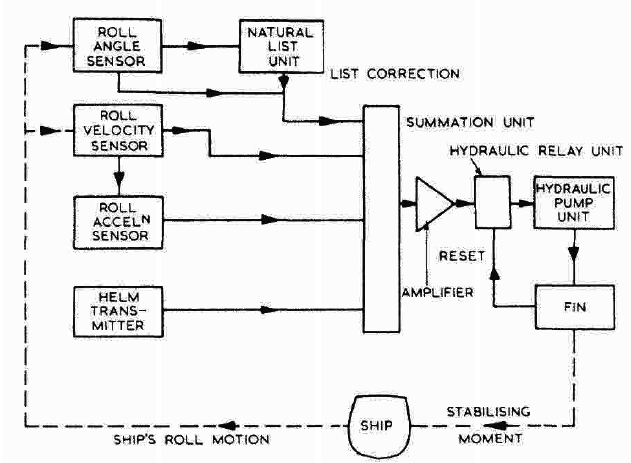 : Se puede lograr una reducción de rollo superior al 90%, normalmente de salida a salida de 30° reducida a menos de 3° de salida a salida, en resonancia y se pueden mantener rollos residuales bajos en una amplia gama de frecuencias. Sin embargo, dado que la potencia estabilizadora varía como el cuadrado de la velocidad del barco, las aletas son menos efectivas a velocidad baja o cero, donde funcionan solo como quillas de sentina adicionales.
: Se puede lograr una reducción de rollo superior al 90%, normalmente de salida a salida de 30° reducida a menos de 3° de salida a salida, en resonancia y se pueden mantener rollos residuales bajos en una amplia gama de frecuencias. Sin embargo, dado que la potencia estabilizadora varía como el cuadrado de la velocidad del barco, las aletas son menos efectivas a velocidad baja o cero, donde funcionan solo como quillas de sentina adicionales.