ARTICLE
Pete Millett

Recevez des ressources précieuses directement dans votre boîte de réception – envoyées une fois par mois
Nous apprécions votre vie privée
Introduction
De nombreuses applications de contrôle de mouvement utilisent des moteurs à courant continu à aimant permanent. Comme il est plus facile de mettre en œuvre des systèmes de contrôle utilisant des moteurs à courant continu par rapport aux moteurs à courant alternatif, ils sont souvent utilisés lorsque la vitesse, le couple ou la position doivent être contrôlés.
Il existe deux types de moteurs à courant continu couramment utilisés: les moteurs à balais et les moteurs sans balais (ou moteurs BLDC). Comme leur nom l’indique, les moteurs à balais à courant continu ont des brosses, qui sont utilisées pour commuter le moteur pour le faire tourner. Les moteurs sans balais remplacent la fonction de commutation mécanique par une commande électronique.
Dans de nombreuses applications, un moteur à courant continu brossé ou sans balais peut être utilisé. Ils fonctionnent selon les mêmes principes d’attraction et de répulsion entre les bobines et les aimants permanents. Les deux présentent des avantages et des inconvénients qui peuvent vous amener à choisir l’un plutôt que l’autre, en fonction des exigences de votre application.
Moteurs à balais à courant continu
Moteurs à balais à courant continu (image du groupe maxon)
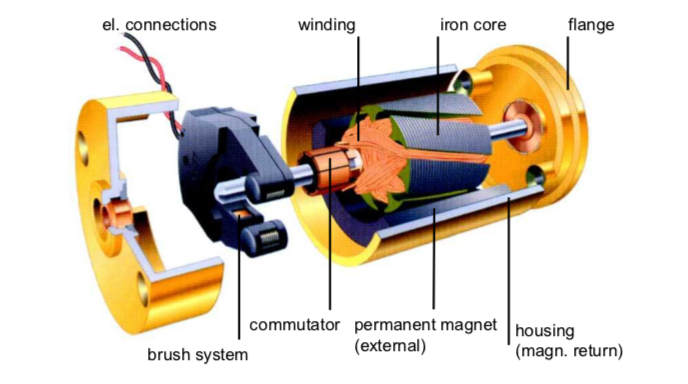
Les moteurs à courant continu utilisent des bobines de fil enroulées pour créer un champ magnétique. Dans un moteur brossé, ces bobines sont libres de tourner pour entraîner un arbre – elles sont la partie du moteur appelée « rotor ». Habituellement, les bobines sont enroulées autour d’un noyau de fer, bien qu’il existe également des moteurs à balais « sans noyau », où l’enroulement est auto-supporté.
La partie fixe du moteur est appelée « stator ». Les aimants permanents sont utilisés pour fournir un champ magnétique stationnaire. Normalement, ces aimants sont positionnés sur la surface interne du stator, à l’extérieur du rotor.
Afin de créer un couple qui fait tourner le rotor, le champ magnétique du rotor doit tourner en continu, de sorte que son champ attire et repousse le champ fixe du stator. Pour faire tourner le champ, un interrupteur électrique coulissant est utilisé. L’interrupteur est constitué du commutateur, qui est typiquement un contact segmenté monté sur le rotor, et de balais fixes qui sont montés sur le stator.
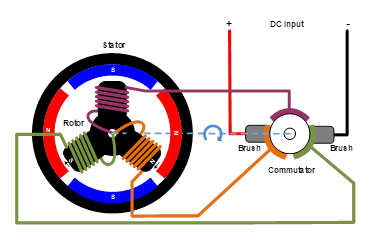
Lorsque le rotor tourne, différents ensembles d’enroulements du rotor sont constamment allumés et éteints par le commutateur. Cela fait que les bobines du rotor sont constamment attirées et repoussées par les aimants fixes du stator, ce qui fait tourner le rotor.
Comme il y a un certain frottement mécanique entre les balais et le commutateur – et comme il s’agit d’un contact électrique, il ne peut généralement pas être lubrifié –, il y a usure mécanique des balais et du commutateur pendant la durée de vie du moteur. Cette usure finira par atteindre un point où le moteur ne fonctionnera plus. De nombreux moteurs à balais – en particulier les gros – ont des brosses remplaçables, généralement en carbone, qui sont conçues pour maintenir un bon contact avec l’usure. Ces moteurs nécessitent un entretien périodique. Même avec des brosses remplaçables, le commutateur s’use également au point que le moteur doit être remplacé.
Pour entraîner un moteur à balais, une tension CONTINUE est appliquée sur les balais, qui fait passer le courant à travers les enroulements du rotor pour faire tourner le moteur.
Dans les cas où la rotation n’est nécessaire que dans un sens et où la vitesse ou le couple n’ont pas besoin d’être contrôlés, aucune électronique d’entraînement n’est requise pour un moteur brossé. Dans des applications comme celle-ci, la tension continue est simplement activée et désactivée pour faire tourner ou arrêter le moteur. Ceci est typique dans les applications à faible coût comme les jouets motorisés. Si une inversion est nécessaire, elle peut être réalisée en utilisant un interrupteur bipolaire.
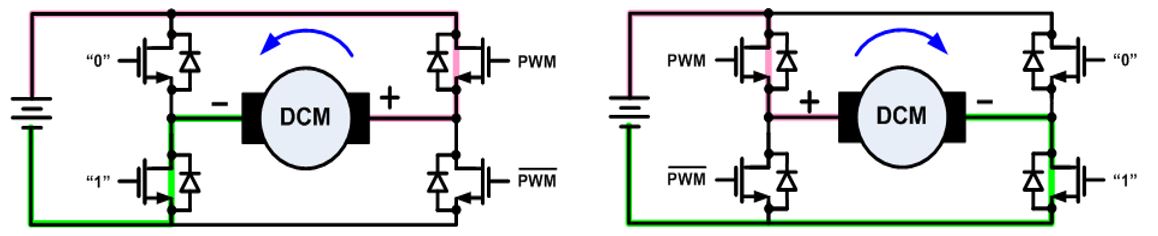
Pour faciliter le contrôle de la vitesse, du couple et de la direction, un « pont en H » composé d’interrupteurs électroniques – transistors, IGBT ou MOSFET – est utilisé pour permettre l’entraînement du moteur dans les deux sens. Cela permet d’appliquer la tension au moteur dans l’une ou l’autre polarité, ce qui fait tourner le moteur dans des directions opposées. La vitesse ou le couple du moteur peut être contrôlé en modulant la largeur d’impulsion de l’un des commutateurs.
Moteurs à courant continu sans balais
Moteurs à courant continu sans balais (image du groupe maxon)
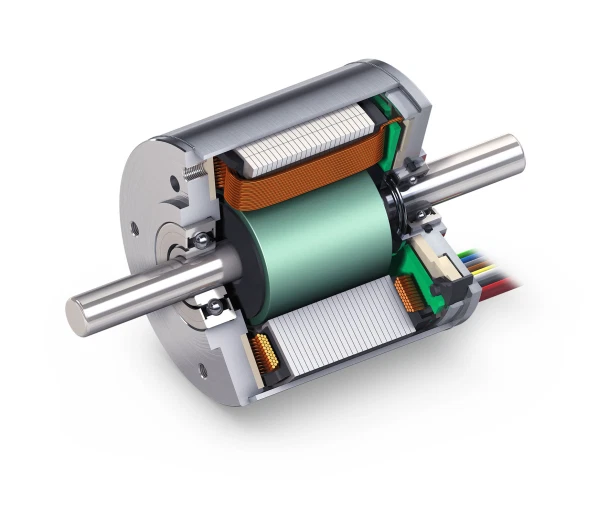
Les moteurs à courant continu sans balais fonctionnent sur le même principe d’attraction et de répulsion magnétiques que les moteurs à balais, mais ils sont construits un peu différemment. Au lieu d’un commutateur mécanique et de balais, le champ magnétique du stator est mis en rotation à l’aide d’une commutation électronique. Cela nécessite l’utilisation d’une électronique de contrôle active.
Dans un moteur sans balais, le rotor est doté d’aimants permanents et le stator d’enroulements. Les moteurs sans balais peuvent être construits avec le rotor à l’intérieur, comme indiqué ci-dessus, ou avec le rotor à l’extérieur des enroulements (parfois appelé moteur « outrunner »).
Le nombre d’enroulements utilisés dans un moteur brushless est appelé le nombre de phases. Bien que les moteurs sans balais puissent être construits avec différents nombres de phases, les moteurs sans balais triphasés sont les plus courants. Une exception concerne les petits ventilateurs de refroidissement qui ne peuvent utiliser qu’une ou deux phases.
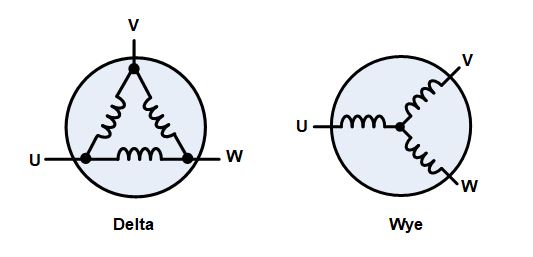
Les trois enroulements d’un moteur brushless sont connectés en configuration » étoile » ou » delta ». Dans les deux cas, trois fils se connectent au moteur et la technique d’entraînement et la forme d’onde sont identiques.
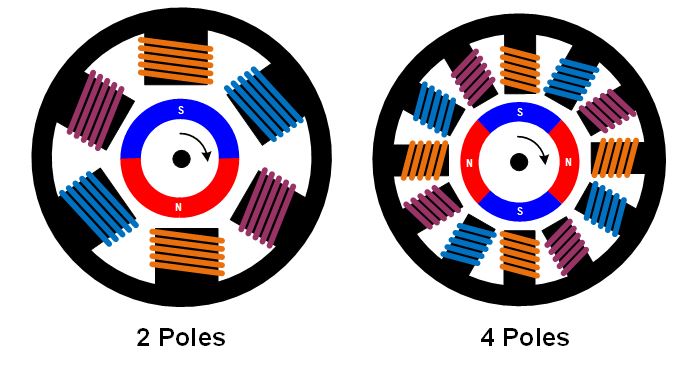
Avec trois phases, les moteurs peuvent être construits avec différentes configurations magnétiques, appelées pôles. Les moteurs triphasés les plus simples ont deux pôles: le rotor n’a qu’une paire de pôles magnétiques, un Nord et un Sud. Les moteurs peuvent également être construits avec plus de pôles, ce qui nécessite plus de sections magnétiques dans le rotor et plus d’enroulements dans le stator. Un nombre de pôles plus élevé peut fournir des performances plus élevées, bien que des vitesses très élevées soient mieux accomplies avec un nombre de pôles inférieur.
Pour entraîner un moteur sans balais triphasé, chacune des trois phases doit pouvoir être entraînée à la tension d’alimentation d’entrée ou à la masse. Pour ce faire, trois circuits d’entraînement en « demi-pont » sont utilisés, chacun constitué de deux interrupteurs. Les commutateurs peuvent être des transistors bipolaires, des IGBT ou des MOSFET, en fonction de la tension et du courant requis.
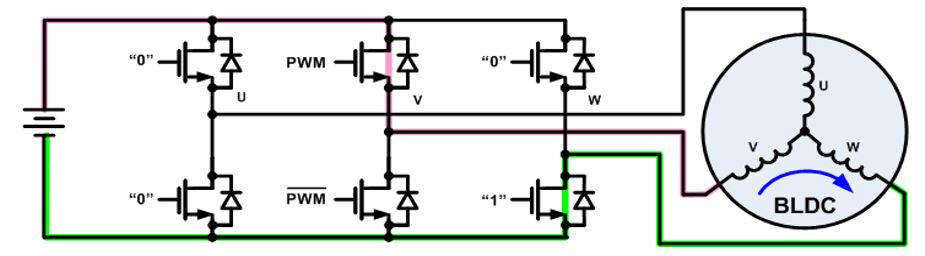
Il existe un certain nombre de techniques d’entraînement qui peuvent être utilisées pour les moteurs sans balais triphasés. Le plus simple est appelé commutation trapézoïdale, en bloc ou à 120 degrés. La commutation trapézoïdale est quelque peu similaire à la méthode de commutation utilisée dans un moteur à balais à courant continu. Dans ce schéma, à un moment donné, l’une des trois phases est connectée à la masse, l’une est laissée ouverte et l’autre est entraînée à la tension d’alimentation. Si un contrôle de la vitesse ou du couple est nécessaire, la phase connectée à l’alimentation est généralement modulée en largeur d’impulsion. Comme les phases sont commutées brusquement à chaque point de commutation, alors que la rotation du rotor est constante, il y a une certaine variation de couple (appelée ondulation de couple) lorsque le moteur tourne.
Pour des performances supérieures, d’autres méthodes de commutation peuvent être utilisées. La commutation sinusoïdale, ou à 180 degrés, entraîne le courant dans les trois phases du moteur tout le temps. L’électronique d’entraînement génère un courant sinusoïdal à travers chaque phase, chacune décalée de 120 degrés l’une par rapport à l’autre. Cette technique d’entraînement minimise l’ondulation du couple, ainsi que le bruit acoustique et les vibrations, et est souvent utilisée pour des entraînements à haute performance ou à haut rendement.
Pour faire tourner correctement le champ, l’électronique de commande doit connaître la position physique des aimants sur le rotor par rapport au stator. Souvent, les informations de position sont obtenues à l’aide de capteurs à effet hall montés sur le stator. Lorsque le rotor magnétique tourne, les capteurs à effet Hall captent le champ magnétique du rotor. Ces informations sont utilisées par l’électronique d’entraînement pour faire passer le courant à travers les enroulements du stator dans une séquence qui fait tourner le rotor.
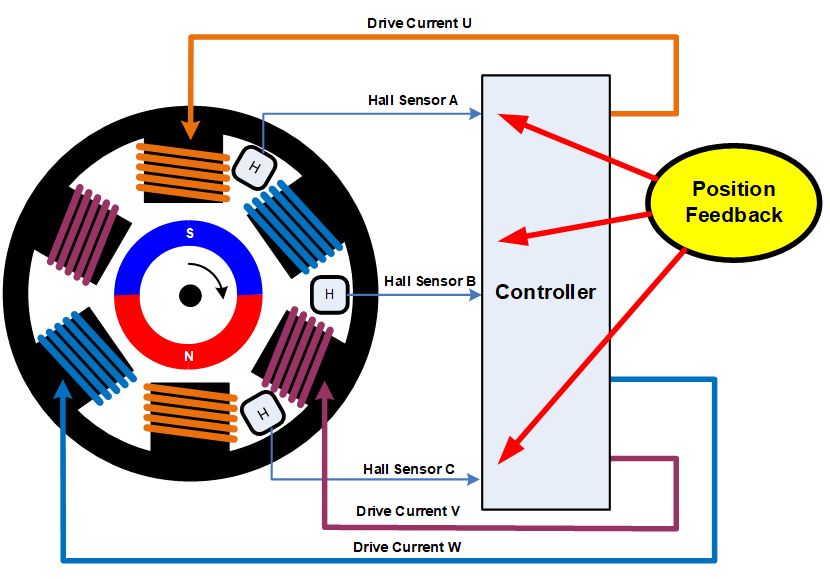
À l’aide de trois capteurs à effet Hall, la commutation trapézoïdale peut être mise en œuvre avec une logique combinatoire simple, de sorte qu’aucune électronique de commande sophistiquée n’est nécessaire. D’autres méthodes de commutation, comme la commutation sinusoïdale, nécessitent une électronique de commande un peu plus sophistiquée et utilisent généralement un microcontrôleur.
En plus de fournir un retour de position à l’aide de capteurs à effet Hall, différentes méthodes peuvent être utilisées pour déterminer la position du rotor sans capteurs. Le plus simple est de surveiller la CEM arrière sur une phase non alimentée pour détecter le champ magnétique par rapport au stator. Un algorithme de commande plus sophistiqué, appelé Commande orientée champ ou FOC, calcule la position en fonction des courants du rotor et d’autres paramètres. FOC nécessite généralement un processeur assez puissant, car de nombreux calculs doivent être effectués très rapidement. Ceci, bien sûr, est plus coûteux qu’une simple méthode de contrôle trapézoïdale.
Moteurs Brushless et Brushless: Avantages et inconvénients
Selon votre application, il existe des raisons pour lesquelles vous pouvez choisir d’utiliser un moteur brushless plutôt qu’un moteur brossé. Le tableau suivant résume les principaux avantages et inconvénients de chaque type de moteur:
| Moteur brossé | Moteur brushless | |
| Durée de vie | Courte (les brosses s’usent) | Longue (pas de brosses à porter) |
| Vitesse et accélération | Moyenne | Élevée |
| Efficacité | Moyenne | Élevée |
| Bruit électrique | Bruyant (arc de brousse) | Silencieux |
| Bruit acoustique & Ondulation de couple | Faible | Moyenne (trapézoïdale) ou bonne (sinusoïdale) |
| Coût | Le plus bas | Moyen (électronique ajoutée) |
Durée de vie
Comme mentionné précédemment, l’un des inconvénients des moteurs à balais est qu’il y a usure mécanique des balais et du collecteur. Les balais de charbon en particulier sont sacrificiels et, dans de nombreux moteurs, ils sont conçus pour être remplacés périodiquement dans le cadre d’un programme de maintenance. Le cuivre mou du collecteur est également lentement usé par les brosses et finit par atteindre un point où le moteur ne fonctionnera plus. Comme les moteurs sans balais n’ont pas de contacts mobiles, ils ne souffrent pas de cette usure.
Vitesse et accélération
Moteurs à balais la vitesse de rotation peut être limitée par les balais et le collecteur, ainsi que par la masse du rotor. À des vitesses très élevées, le contact de la brosse avec le collecteur peut devenir erratique et l’arc de la brosse augmente. La plupart des moteurs à balais utilisent également un noyau de fer laminé dans le rotor, ce qui leur confère une grande inertie de rotation. Cela limite les taux d’accélération et de décélération du moteur. Il est possible de construire un moteur brushless avec des aimants de terres rares très puissants sur le rotor, ce qui minimise l’inertie de rotation. Bien sûr, cela augmente le coût.
Bruit électrique
Les brosses et le commutateur forment une sorte d’interrupteur électrique. Lorsque le moteur tourne, les interrupteurs sont ouverts et fermés, tandis qu’un courant important circule à travers les enroulements du rotor, qui sont inductifs. Il en résulte un arc au niveau des contacts. Cela génère une grande quantité de bruit électrique, qui peut être couplé à des circuits sensibles. L’arc peut être quelque peu atténué en ajoutant des condensateurs ou des snubbers RC à travers les balais, mais la commutation instantanée du commutateur génère toujours un bruit électrique.
Bruit acoustique
Les moteurs à balais sont « à commutation dure », c’est–à-dire que le courant est brusquement déplacé d’un enroulement à un autre. Le couple généré varie au fil de la rotation du rotor à mesure que les enroulements s’allument et s’éteignent. Avec un moteur brushless, il est possible de contrôler les courants d’enroulement de manière à faire passer progressivement le courant d’un enroulement à un autre. Cela réduit l’ondulation du couple, qui est une pulsation mécanique d’énergie sur le rotor. L’ondulation du couple provoque des vibrations et des bruits mécaniques, en particulier à faible vitesse du rotor.
Coût
Étant donné que les moteurs sans balais nécessitent une électronique plus sophistiquée, le coût global d’un entraînement sans balais est plus élevé que celui d’un moteur à balais. Même si un moteur brushless est plus simple à fabriquer qu’un moteur brossé, car il manque de balais et de collecteur, la technologie des moteurs brossés est très mature et les coûts de fabrication sont faibles. Cela change à mesure que les moteurs sans balais deviennent plus populaires, en particulier dans les applications à volume élevé comme les moteurs automobiles. En outre, le coût de l’électronique, comme les microcontrôleurs, continue de baisser, rendant les moteurs sans balais plus attrayants.
Résumé
En raison de la baisse des coûts et de meilleures performances, les moteurs sans balais gagnent en popularité dans de nombreuses applications. Mais il y a encore des endroits où les moteurs brossés ont plus de sens.
On peut beaucoup apprendre en examinant l’adoption des moteurs sans balais dans les automobiles. À partir de 2020, la plupart des moteurs qui fonctionnent chaque fois que la voiture tourne – des choses comme les pompes et les ventilateurs – sont passés de moteurs à balais à des moteurs sans balais pour leur fiabilité accrue. Le coût supplémentaire du moteur et de l’électronique compense largement le taux plus faible de défaillances sur le terrain et la diminution des besoins de maintenance.
D’autre part, les moteurs qui fonctionnent rarement – par exemple, les moteurs qui déplacent les sièges électriques et les vitres électriques – sont restés principalement des moteurs à balais. Le raisonnement est que le temps de fonctionnement total sur la durée de vie de la voiture est très faible et qu’il est très peu probable que les moteurs tombent en panne pendant la durée de vie de la voiture.
Alors que le coût des moteurs sans balais et de leurs composants électroniques associés continue de diminuer, les moteurs sans balais trouvent leur place dans des applications traditionnellement détenues par des moteurs à balais. Comme un autre exemple du monde de l’automobile, les moteurs de réglage de siège dans la carte haut de gamme ont adopté des moteurs sans balais car ils génèrent moins de bruit acoustique.
Obtenir un support technique