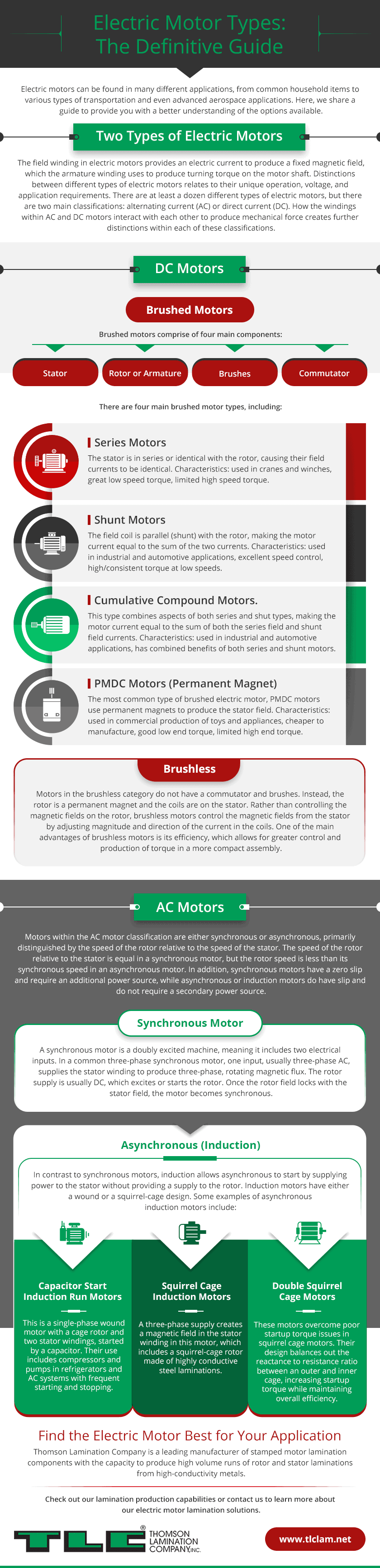
Les moteurs électriques peuvent être trouvés dans de nombreuses applications différentes, des articles ménagers courants aux différents types de transport et même aux applications aérospatiales avancées. Ici, nous partageons un guide pour vous fournir une meilleure compréhension des options disponibles.
Moteurs électriques par rapport aux générateurs
Les moteurs électriques et les générateurs sont des dispositifs électromagnétiques avec un enroulement d’induit ou un rotor, qui tourne dans un enroulement de champ ou un stator; cependant, ils ont des fonctions opposées. Les générateurs convertissent l’énergie mécanique en énergie électrique tandis que les moteurs convertissent l’énergie électrique en énergie mécanique.
Deux types de moteurs électriques
L’enroulement de champ dans les moteurs électriques fournit un courant électrique pour produire un champ magnétique fixe, que l’enroulement d’induit utilise pour produire un couple de rotation sur l’arbre du moteur. Les distinctions entre les différents types de moteurs électriques se rapportent à leurs exigences uniques de fonctionnement, de tension et d’application. Il existe au moins une douzaine de types de moteurs électriques différents, mais il existe deux classifications principales: le courant alternatif (CA) ou le courant continu (CC). La façon dont les enroulements des moteurs à courant alternatif et à courant continu interagissent les uns avec les autres pour produire une force mécanique crée d’autres distinctions dans chacune de ces classifications.
Moteurs à courant continu
Moteurs à balais
Les moteurs à balais comprennent quatre composants principaux:
- Stator
- Rotor ou armature
- Balais
- Collecteur
Il existe quatre principaux types de moteurs à balais, dont: Moteurs de la série
- . Le stator est en série ou identique au rotor, ce qui fait que leurs courants de champ sont identiques. Caractéristiques: utilisé dans les grues et les treuils, grand couple à basse vitesse, couple à grande vitesse limité.
- Moteurs de dérivation. La bobine de champ est parallèle (shunt) au rotor, ce qui rend le courant du moteur égal à la somme des deux courants. Caractéristiques: utilisé dans les applications industrielles et automobiles, excellent contrôle de vitesse, couple élevé / constant à basse vitesse.
- Moteurs composés cumulatifs. Ce type combine des aspects des types série et fermé, rendant le courant du moteur égal à la somme des courants de champ série et de champ de dérivation. Caractéristiques: utilisé dans les applications industrielles et automobiles, a combiné les avantages des moteurs de série et de shunt.
- Moteurs PMDC (Aimant permanent). Le type le plus courant de moteur électrique brossé, les moteurs PMDC utilisent des aimants permanents pour produire le champ du stator. Caractéristiques: utilisé dans la production commerciale de jouets et d’appareils, moins cher à fabriquer, bon couple bas de gamme, couple haut de gamme limité.
Brushless
Les moteurs de la catégorie brushless n’ont pas de collecteur ni de balais. Au lieu de cela, le rotor est un aimant permanent et les bobines sont sur le stator. Plutôt que de contrôler les champs magnétiques sur le rotor, les moteurs sans balais contrôlent les champs magnétiques du stator en ajustant l’amplitude et la direction du courant dans les bobines. L’un des principaux avantages des moteurs sans balais est son efficacité, qui permet un meilleur contrôle et une production de couple dans un ensemble plus compact.
Moteurs à courant alternatif
Les moteurs de la classification des moteurs à courant alternatif sont synchrones ou asynchrones, se distinguant principalement par la vitesse du rotor par rapport à la vitesse du stator. La vitesse du rotor par rapport au stator est égale dans un moteur synchrone, mais la vitesse du rotor est inférieure à sa vitesse synchrone dans un moteur asynchrone. De plus, les moteurs synchrones ont un glissement nul et nécessitent une source d’alimentation supplémentaire, tandis que les moteurs asynchrones ou à induction ont un glissement et ne nécessitent pas de source d’alimentation secondaire.
Moteur synchrone
Un moteur synchrone est une machine doublement excitée, ce qui signifie qu’il comprend deux entrées électriques. Dans un moteur synchrone triphasé commun, une entrée, généralement à courant alternatif triphasé, alimente l’enroulement du stator pour produire un flux magnétique triphasé en rotation. L’alimentation du rotor est généralement en courant continu, ce qui excite ou démarre le rotor. Une fois que le champ du rotor se verrouille avec le champ du stator, le moteur devient synchrone.
Asynchrone (Induction)
Contrairement aux moteurs synchrones, l’induction permet au démarrage asynchrone d’alimenter le stator sans alimenter le rotor. Les moteurs à induction ont une conception à enroulement ou à cage d’écureuil. Voici quelques exemples de moteurs asynchrones à induction:
- Moteurs à induction à Démarrage par condensateur. Il s’agit d’un moteur bobiné monophasé avec un rotor à cage et deux enroulements de stator, démarré par un condensateur. Leur utilisation comprend les compresseurs et les pompes dans les réfrigérateurs et les systèmes de climatisation avec démarrage et arrêt fréquents.
- Moteurs à induction à cage d’écureuil. Une alimentation triphasée crée un champ magnétique dans l’enroulement statorique de ce moteur, qui comprend un rotor à cage d’écureuil en tôles d’acier hautement conductrices. Ce sont des moteurs à faible coût, à faible entretien et à haut rendement utilisés dans les pompes centrifuges, les entraînements industriels, les grands ventilateurs et ventilateurs, les machines-outils, les tours et autres équipements de tournage.
- Moteurs à Double Cage d’écureuil. Ces moteurs surmontent les problèmes de couple de démarrage dans les moteurs à cage d’écureuil. Leur conception équilibre le rapport réactance / résistance entre une cage extérieure et intérieure, augmentant le couple de démarrage tout en maintenant l’efficacité globale.
Identification du moteur électrique
La sélection du moteur le mieux adapté à une application spécifique dépend de la satisfaction des besoins de quatre caractéristiques:
- Puissance et vitesse
- Châssis du moteur
- Exigences de tension
- Boîtiers et positions de montage
Une plaque signalétique métallique fixée au moteur contient des informations critiques relatives à ces caractéristiques, à l’exception des informations sur le boîtier.
Puissance du moteur électrique & Vitesse nominale
La puissance nominale et la vitesse nominale de rotation (TR/ min) doivent correspondre aux exigences de charge de l’application installée. Les moteurs sont disponibles dans différentes catégories de puissance, notamment: moteurs fractionnaires (1 / 20e HP à 1 HP), moteurs à puissance intégrale (1 HP à 400 HP) et gros moteurs (100 HP à 50 000 HP). Les cotes de TR / min comprennent 3600 TR / min (2 pôles), 1800 TR / min (4 pôles) et 1200 TR / min (6 pôles).
Cadre du moteur électrique
La taille du cadre du moteur n’indique pas ses valeurs de performance, en particulier sa puissance nominale. La National Electrical Manufacturers Association (NEMA) a conçu les numéros de châssis pour correspondre aux tailles de montage avec leurs chiffres relatifs à leur dimension « D » ou à la distance entre le centre de l’arbre et le centre du support. En général, les étiquettes à deux chiffres sont pour les moteurs fractionnaires, mais des moteurs de plus grande puissance peuvent y être intégrés.
Exigences de tension
La tension, la fréquence et la phase font toutes partie des exigences de tension. Dans la plupart des cas nord-américains et européens, les moteurs triphasés incluent des affichages à double tension comme 230/460. La fréquence de fonctionnement standard de la plupart des moteurs électriques est de 60 Hz, bien que les moteurs à 50 Hz soient courants en Europe. Cette variation en hertz indique que le moteur fonctionnera à 5/6 de sa vitesse de rotation normale. La phase est le dernier bit d’information inclus avec les exigences de tension d’un moteur, indiquant le type d’alimentation requis, tel que triphasé, monophasé et CC.
Boîtiers et positions de montage
Les informations relatives au boîtier dépendent de l’environnement d’installation du moteur. Il existe deux catégories principales de boîtiers: les moteurs ouverts et les moteurs fermés.
Moteurs ouverts
Les applications de moteurs ouverts incluent des emplacements intérieurs relativement propres et secs, ce qui est important car les boîtiers de moteurs ouverts permettent la circulation de l’air à travers les enroulements.
Moteurs fermés
Ces types ne permettent pas un libre échange d’air entre l’extérieur et l’intérieur du moteur. Les variations de l’étanchéité à l’air et des caractéristiques de refroidissement du boîtier distinguent en outre les types de moteurs fermés, notamment:
- Totalement Fermé Refroidi par Ventilateur (TEFC)
- Totalement Fermé Non Ventilé (TENV)
- Totalement Fermé Au-Dessus de l’Air (TEAO)
- Totalement Fermé Au lavage (TEWD)
- Boîtiers Antidéflagrants (EXPL)
- Emplacement Dangereux (HAZ)
Trouvez le moteur électrique le mieux adapté à votre application
Thomson Lamination Company est l’un des principaux fabricants de composants de laminage de moteurs estampés capables de produire des séries de tôles de rotor et de stator à grand volume à partir de métaux à haute conductivité.
Découvrez nos capacités de production de laminage ou contactez-nous pour en savoir plus sur nos solutions de laminage de moteurs électriques.