Stabilizzatori e sistemi di stabilizzazione delle navi
Una nave in mare ha sei gradi di libertà, vale a dire
1. Rotolo, 2. Sollevamento, 3. Lancio, 4. Imbardata, 5. Ondeggiare, 6. Ondata.
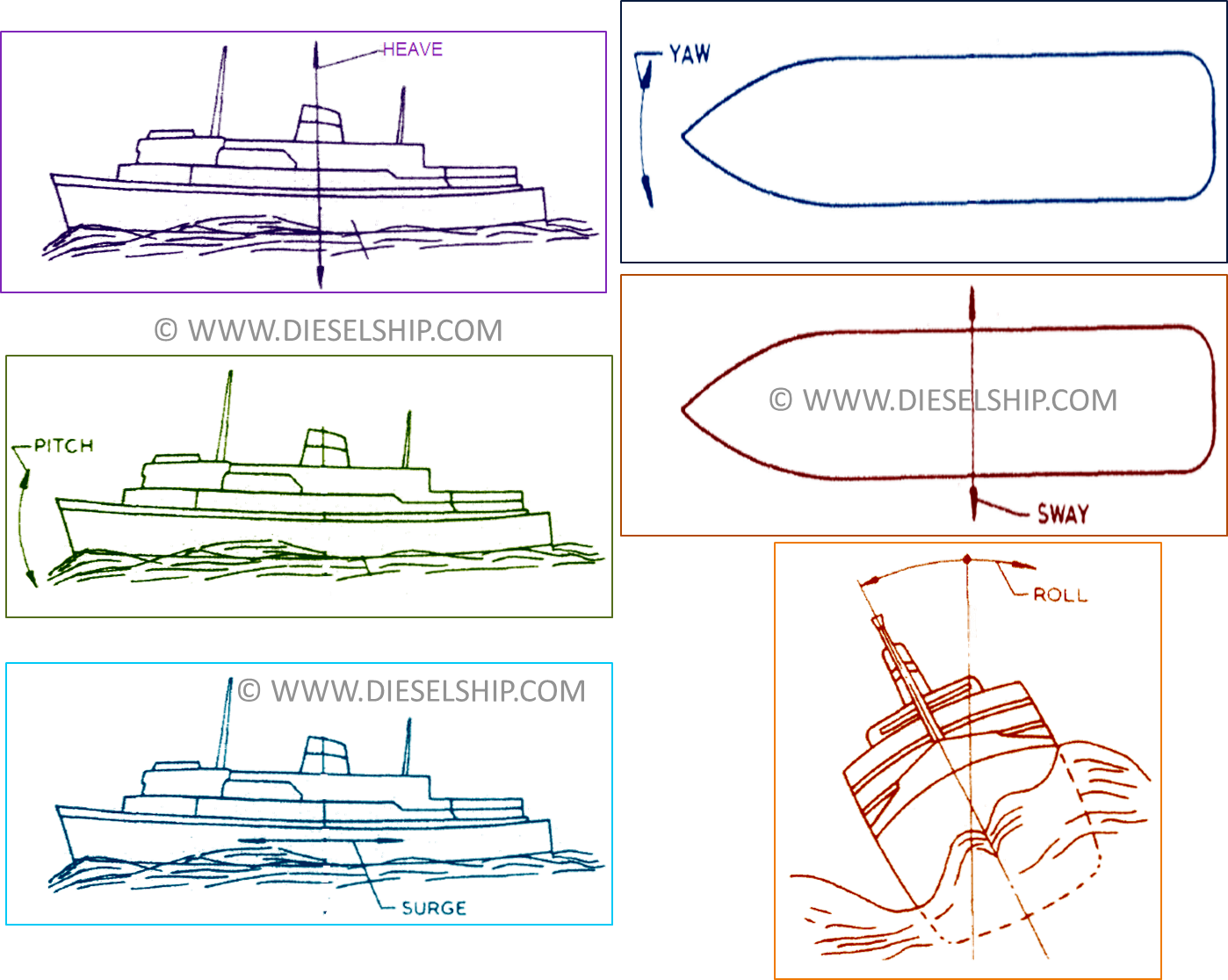
– Di tutti questi movimenti, solo il movimento di rotolamento può essere efficacemente ridotto in pratica montando chiglie di sentina, serbatoi antirollio o stabilizzatori.
- La pinna stabilizzatori
- Serbatoio sistema di stabilizzazione.
Stabilizzatori pinna
Funzionamento di base:
Avete mai provato questo mentre si viaggia in auto??
Apri lo scudo della finestra e metti insieme tutte le tue figure rivolte in avanti con il palmo rivolto verso la strada mentre l’auto è in movimento in avanti a una certa velocità e assicurati che le dita siano dritte.
A questa condizione la tua mano rimarrà dritta e non dovrai affrontare alcuna forza sopra o sotto le dita questo è semplicemente chiamato “Trascinamento”.
1. Ora sollevare leggermente le dita verso l’alto e vedrete che c’è un ascensore sotto le dita e la mano tenderà ad andare verso l’alto questo chiamato come un ‘ascensore’.
2. Ora metti tutte le dita verso il basso vedrai che c’è una forza di spinta di sollevamento sulla parte superiore della tua mano e la tua mano tenderà ad andare verso il basso questo è chiamato “spinta” o “Sollevamento verso il basso”
3. Ora rallentare la macchina e ridurre la velocità e ripetere i passaggi precedenti si vedrà la forza di sollevamento e spinta è notevolmente ridotto, il che significa che la velocità di trascinamento è più importante per avere un buon ascensore o una spinta.
La tecnica di cui sopra spiega semplicemente la base di trascinamento, sollevamento positivo e sollevamento negativo di un aero foil o aliscafo pinne che vengono utilizzati sulle navi.
Stabilizzatori alette
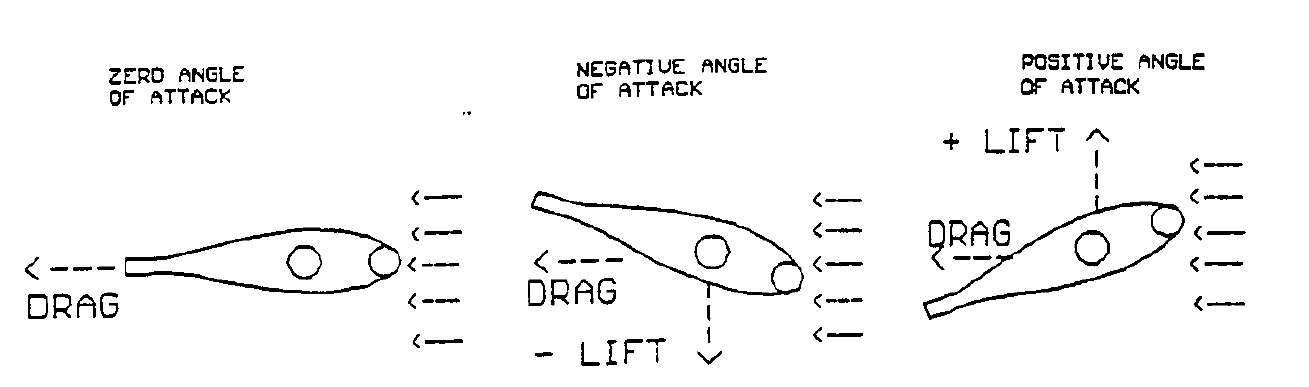
Zero Angolo di attacco:
– Quando non vi è alcun movimento di rotolamento della nave le pinne rimangono a 0o angolo e non vi è alcuna forza di sollevamento o spinta offerto alle pinne come mostrato nella figura sopra.
Negativo & Angolo di attacco positivo:
– Ora, la nave tende a rotolare verso il lato di dritta e l’azione di cui sopra è semplicemente invertita per offrire una spinta sul lato di dritta e una trazione sul lato di porta.
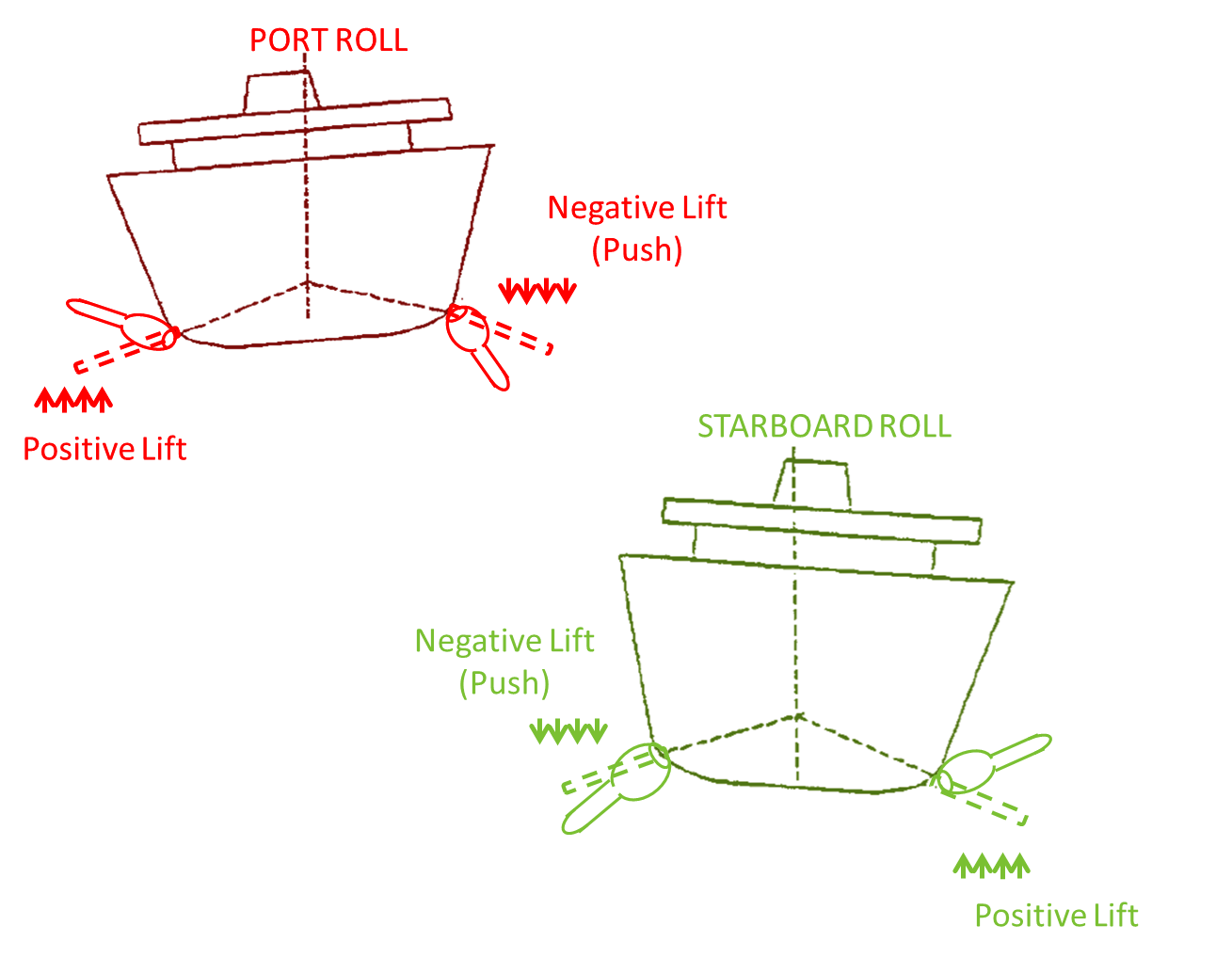
– Quando il bordo anteriore della pinna è inclinato verso l’alto, il flusso d’acqua attraverso la parte superiore del profilo produce sollevamento a causa di un calo di pressione mentre una pressione di sollevamento è fornita dal flusso lungo la parte inferiore. Inclinazione verso il basso del bordo in avanti della pinna, inverte l’effetto, in modo che un calo di pressione si verifica nella parte inferiore e una maggiore pressione nella parte superiore per dare una forza verso il basso.
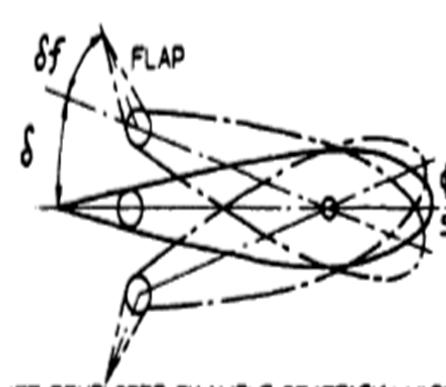
Tipo di alette
– La sezione dell’aliscafo può essere interamente mobile, con o senza alette o parzialmente fissa, parzialmente mobile, Queste alette sono inclinate, solitamente idraulicamente, in fase con il rollio a periodi di onde lunghe, 90° fuori fase a risonanza e in fase con accelerazione del rollio a brevi periodi.
Pinne con tutti i beni mobili di superficie
 Pinne con tutti i beni mobili di superficie con ulteriori aletta di coda
Pinne con tutti i beni mobili di superficie con ulteriori aletta di coda
Pinne con struttura fissa
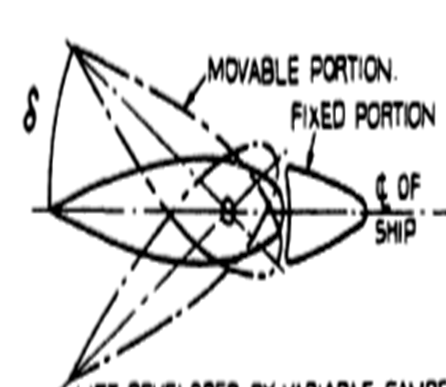
– Non retrattile pinne sono comunemente utilizzati in condizioni di spazio all’interno del guscio è limitato. Di solito sono montati a cavallo della sentina e non proiettano oltre la linea verticale dal lato della nave o sotto la linea orizzontale del fondo della nave, per ridurre al minimo il rischio di contatto con un muro di banchina o il fondo della banchina.
Come viene controllato il movimento delle pinne?
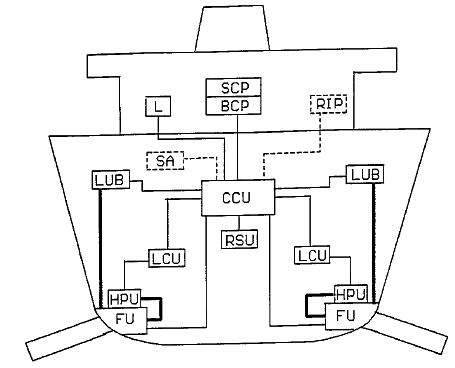
Linee più Spesse = Linee Idrauliche; Linee più Sottili = Linee Elettriche
SCP = SOLAS pannello di Controllo, BCP = Ponte Pannello di Controllo, L = diario di bordo, RIP = Indicatore Remoto del Pannello, SA = l’Automazione della Nave, LUB = Olio Lubrificante Serbatoio, CCU = Unità Centrale di Controllo, RSU = Rotolo sensore LCU = Locale unità di Controllo, HPU = Unità di forza Idraulica, FU = Fin Unità.
– Il controllo del movimento delle pinne è automatico e di solito deriva da un dispositivo di rilevamento giroscopico che, nella sua forma più semplice — il controllo della velocità – si basa su un piccolo giroscopio azionato elettricamente montato orizzontalmente con il suo asse.
– La velocità angolare di rollio di una nave cause del giroscopio al processo contro la centralizzazione springs per un importo proporzionale alla velocità e genera una piccola forza idraulica amplificato da un idraulico unità a relè per fornire potenza sufficiente per azionare i comandi della pompa a portata variabile, tramite un’adeguata articolazione.
– Parte del collegamento è accoppiato all’albero dell’aletta per trasmettere un segnale di annullamento al comando della pompa e per far riposare l’aletta all’angolo di inclinazione richiesto dall’unità di rilevamento.
– Le navi raramente rotolano in modalità puramente risonante; lo stato del mare è spesso molto confuso. Sistemi di controllo più elaborati e più costosi sono necessari per affrontare il rotolo improvvisamente applicato, il rotolamento a periodi di risonanza e il rotolamento in condizioni derivanti dalla combinazione di più frequenze d’onda.
RSU-Unità sensore rotolo in dettaglio (Sistema di controllo compensato)
Sistema di controllo compensato