掃除するときにロボットの真空が部屋の周りを移動する方法は本当に重要です。
Gianmarco Chumbe/CNET
ひどいロボットの真空でさえ、あなたの床から少なくともいくつかの汚れを取り除きます。 しかし、それがどのくらいの地面をカバーしているか、そして部屋を通って移動するその行動は、モデルからモデルに大きく異なります。
この背後にある最も重要な要因は、ロボットのナビゲーションシステムです。 その運行技術は、ソフトウェアとともに、真空の行為を定める。 それは、与えられたロボットが空間をどれだけきれいにするか、あるいは庭の雑草を狩るかに大きな役割を果たします。 ご想像のように、いくつかのロボット掃除機は、他のものよりも優れたタスクを実行します。
続きを読む:あなたのロボットの真空が動けなくなることはありませんので、あなたの家を準備する方法
幸いなことに、ルイビル、ケンタッキー州の私たちの倉庫ラボで私たちのロボット真空試験室は、私たちは、彼らが知覚相互作用し、そうでなければ、物理的な空間内で動き回るどれだけ含め、ロボット真空の違いを示すのに役立ちます。

私たちの新しいテストルームを破るために、私たちはその床を横切って9つの現在のロボット真空モデルを実行しました。
Tyler Lizenby/CNET
予算上のロボットナビゲーション
ロボット掃除機が通常スペースをナビゲートするために使用するシステムには、主に三つのタイプがあります。 最初は衝突、車輪、ブラシおよび崖センサーの簡単なコレクションである。 彼らは、彼らがヒットしたり、オブジェクトをヒットしようとしているときにロボットを教えています。 その情報を使用すると、彼らは減速したり、コースを完全に変更することができます。 さらに、これらのセンサーは、真空が階段の落下を避けるのに役立ちます。
あなたは予算のロボット掃除機でこれらのシステムを見つける傾向があります。 利点は、彼らがより複雑なマシンよりもはるかに少ないコストです。 $250Eufy Robovac11Sは、このスタイルのナビゲーションを備えた製品の一例です。

ここでEufy RoboVac11S Maxのような衝突と近接センサーを搭載した基本的なロボット掃除機は、障害物の周りを跳ね返して道を見つけますが、多くのオープンフロア
Gianmarco Chumbe/CNET
欠点は、彼らがランダムな方法で動作し、物事にぶつかり、部屋の周りを行き当たりばったりに方向転換することです。 非常に最初のiRobotルンバは同じことをしました。 悲しいことに不完全な床の適用範囲で起因する。 堅い場所(コーナー、テーブルおよび椅子の足)の点は繰り返しの注意の多くを得る。 しかし、オープンエリアは、ロボットがその経路で何かを検出するまで直線で移動するので、一度掃除機をかけられる可能性があります(またはまったく

この画像は、ロボットが清掃のためにカバーした実際の領域を示すように設計されています。 あなたが言うことができるように、Ecovacs Deebot500は非常に矛盾していました。
Gianmarco Chumbe/CNET
これらのマシンも、最も先進的なロボット掃除機が同じ領域を攻撃する必要があるのと同じくらい長い時間がかかります。
確かに、誰も家にいないときに掃除をする傾向があり、一日中掃除をするのであれば、長いきれいな時間はあまり重要ではありません。 会社が45分以内に到着する予定の場合、またはその他の時間制限のある状況では、それは問題です。
続きを読む: 2021年のベストロボット掃除機
視覚的または光学的ナビゲーション
その他のロボット掃除機は、衝突センサーの基本的な配列とレンズによって増強された主な視覚センサーを組み合わせています。 これらのバキュームは、visual simultaneous location and mapping(vslam)と呼ばれるナビゲーションアルゴリズムを使用しています。 光学系は、天井のランドマークを識別するだけでなく、壁間の距離を判断することができます。

iRobot Roomba i7Plusは、光学技術のおかげで、より論理的で徹底的なナビゲーションパスを示しています。
Gianmarco Chumbe/CNET
VSLAMはまた、部屋内の真空の相対位置をリアルタイムで計算し、ボットがクリーンアップするときにマップを作成させます。 このように作動するロボット掃除機は組織的に論理的なパターンの床をきれいにするより大きい効率の部屋を、運行する。 彼らはロボットが既に旅したことを知っている部屋の区域に掃除機をかける時間を無駄にしない。 その結果、それらは物理的なセンサーだけに基づいてロボットより短い時間の、そしてよりよい適用範囲と同じ区域をカバーできます。
iRobotの現在のルンバのラインは、S950S9Plusを含む、この種のナビゲーションシステムを持っています。 同じことが、higher400Deebot711のようなハイエンドのEcovacモデルにも当てはまります。

その光学運行は私達のテスト部屋の床を渡るはるかに完全な適用範囲に翻訳する。
Gianmarco Chumbe/CNET
視覚的に駆動されるロボット掃除機にはいくつかの欠点があります。 彼らの光学センサーは、少なくともいくつかの量の周囲光が存在する必要があるので、完全に暗い部屋で自分の道を見つけるのに苦労しています。 基本的なモデルと比較して、あなたはあまりにも、これらのよりインテリジェントなロボットのために余分に支払うことになります。
レーザーナビゲーション
ロボット掃除機が環境を感知できるもう一つの方法は、lidar(光検出と測距)です。 WaymoやUberのような多くの自動運転車のプロトタイプに見られるのと同じ種類の技術です。 すべてのNeato Botvacsは、接続されたBotvac D7を含むこの方法を使用します。
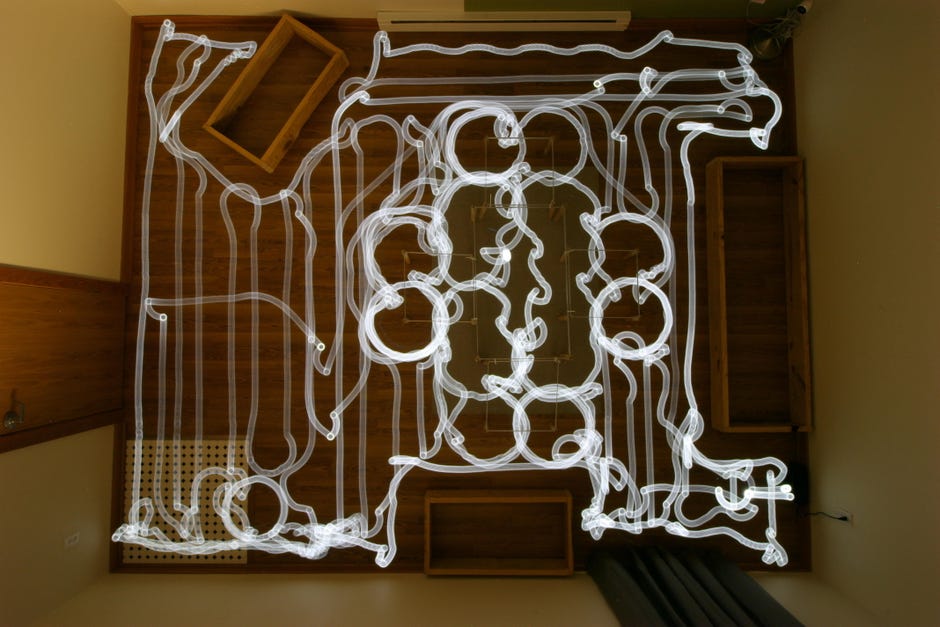
ここでは、テストルームでlidar SLAMシステムを使用して接続されたNeato Botvac D6のビューを示します。
Gianmarco Chumbe/CNET
$579Ozmo930のようなトップ層のEcovac Deebotsにもlidarが内蔵されています。 この洗練されたシステムでは、ロボット真空の上に取付けられるタレットベースのレーザーはロボットが位置および間隔を把握するのを助けるように目的 Lidarを搭載した真空は、その経路内の物の大きさと形状を検出することもできます。

lidarによって導かれて、NeatoのBotvac D6の運行パターンは非常に組織的、仕事を完全に終らせるためにパスを最大限に活用し、短い時間でだった。
Gianmarco Chumbe/CNET
彼らは周囲も積極的にスキャンしています。 そういうわけでこれらの機械は極度な効率で床をカバーしがちである。 たとえば、Neato Botvac D7とBotvac D6の両方が21分以内にテストルームの床を清掃しました。
SharkNinja Ion S87は、その基本的なナビゲーションで、私たちのテストルームの床の清掃に1時間9分を費やしました。 同様に、2台の予算のEcovacsマシン、Deebot500とDeebot600は、どちらも1時間以上(それぞれ60分と64分)の洗浄時間を持っていました。 しかし、最も長いのは170ドルのEufy RoboVac11S Max(100分34秒)で、このグループで最も安いモデルでもありました。

まばらに見るパスの計画と、Neato Botvac D6は全体のテスト部屋の床を本質的にカバーすることをどうにかして。
Gianmarco Chumbe/CNET
lidarの利点はランタイムの短縮だけではありません。 同時位置とマッピング(別名SLAM)アルゴリズムとペアになって、これらのロボットはまた、その場で詳細なマップを作成します。 これらのマップでも便利な操作を実行できます。 たとえば、それらの中に仮想境界をドロップしたり、ロボットが避けるために自由に制限されたゾーンを作ることができます。 これらの掃除機は、必要に応じて暗闇の中を移動します。 すべてのことは素晴らしいです。 ちょうどあなたがこれらのマシンの保険料を支払うことになります覚えています。 彼らは通常、市場の超ハイエンドのラングを占めています。
ハイブリッドシステム
いくつかのロボット掃除機が取る新しいアプローチは、複数のナビゲーション技術を一つのシステムに結合することです。 それはレーザーのエミッターと同様、ブラシ、崖、車輪および光学センサーを含んでいる。 現時点でこれを行う製品はそれほど多くありません。
今日買うことができるのはElectrol499Electrolux Pure i9です。 この独特なロボット真空は組の前部発射のレーザーが装備されている。 それらの真ん中に座って、真空の前面には、レンズの背後にある大きな光学センサーもあります。

Electrolux純粋なi9は、雑種の運行およびセンサーシステムを使用して、完全に私達のテスト部屋の床の区域を逃した。
Gianmarco Chumbe/CNET
そのすべての技術でさえ、私たちのテストルームを通る純粋なi9の動きは混乱していました。 それはネイトとルンバのマシンのように自信を持って転がっていませんでした。 代わりに、それは常に異なる方向に旋回し、フィットして開始でそれを介して混乱しました。
Electrolux純粋なi9は雑種の光学およびレーザーのナビゲーション-システムを使用する。 そうであっても、それはしばしば私たちのテストルームの床を横切って転がって混乱して見えました。
Brian Bennett/CNET
非常に多くのツールと強化されたソフトウェアと処理能力を備えたハイブリッドナビゲーションを備えたロボットは、前代未聞のレベルの自動化と知能を提供する可能性を秘めています。 私はEcovacs Deebot Osmo N8ProPlusが特に有望に見えると思います。 Ecovacsは真空が実際に靴、衣類およびおもちゃの山のような目的を識別し、避けることができることを言う。

ハイブリッドセンサシステムを備えたロボット掃除機は約束を持っています。 Electrolux Pure i9は一つですが、それは私たちのテストルームの床だけでなく、他のマシンをカバーしていませんでした。
Gianmarco Chumbe/CNET
そして、同社はロボットのAIベースの認識が時間の経過とともに新しいオブジェクトを学習すると述べています。 多分そのリストはペット混乱および他のぬれた、goopyまたは粘着性がある残骸を含んでいる。 それは歓迎された更新であり、ロボットの真空が掃除を開始する前よりもあなたの床とあなたのカーペットが救世主になるのを潜在的に救います。
私たちのロボット真空試験室に関するメモ
私たちは過去にロボット真空のための直線的な、清掃性能ベースのテストを実施しましたが、それは実際にはロボット真空があなたの家をどれだけきれいにするかについての絵の一部だけを伝えています。 どれだけうまくそれがスペースを運行できるか、どの位区域を実際にカバーし、どの位かかるかすべての重要な要因、余りにである。
その情報を収集するために、我々は、製造業者のロボット真空試験方法を管理する国際標準機関である国際電気技術委員会の指定を受けて、業界標準の試験室を建設した。
ビデオ:レーザー、センサー、ロボット、ああ私:いくつかのロボット掃除機は、他のものよりもはるかに良い移動し、きれい
私たちのテストルームの中には、ロボットが部屋をきれいにするときに遭遇するものを模倣するように設計されたオブジェ これには、ソファやドレッサーのような大きな家具、ランプやテーブルや椅子の脚のような小さな物体、カーペットのような表面の不規則性、床と電気コードの間の遷移を模倣するように設計された構造物が含まれます。
上に取り付けられたカメラは、すべてのアクションの鳥瞰図をキャプチャします。 そこから私達はクリーニング周期の間に各真空が取る道を把握してもいい。 このシステムはまた私達が機械が実際にカバーする床のどの位、およびそれをするのにかかる時間を計算することを可能にする。
いくつかのロボット掃除機は、他のものよりも方向感覚が優れています
すべての写真を見る
近い将来、私たちからより多くのロボット掃除機 今のところ、我々は、少なくともすべてのロボット掃除機が同じではないことを決定的に言うことができ、ボットが部屋の周りをナビゲートする方法は、そ