船舶安定装置と安定化システム
海上の船舶は6つの自由度、すなわち
1. ロール、2 ヒーブ、3 ピッチ、4 ヨー、5 スウィー、6 サージ…
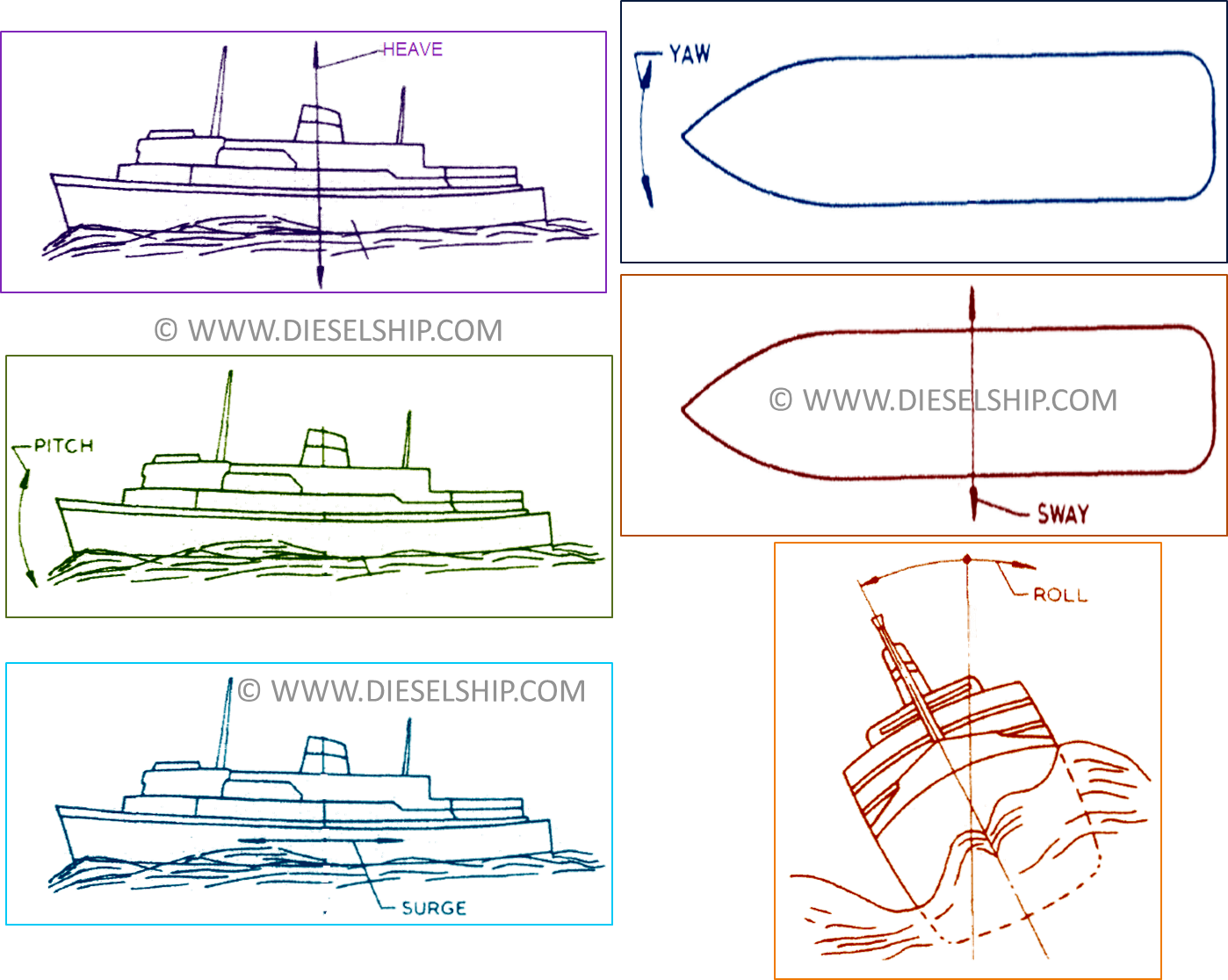
– すべてのこれらの動きの、圧延動きだけビルジのキール、反圧延タンクまたは安定装置に合うことによって効果的に実際に減らすことができます。
–転がり運動を低減するために、船に安定システムが取り付けられています。 これは船を転がすように試みるその動きに反対の力を提供することによって達成される。
–船で使用される二つの基本的な安定化システムがあります;
- フィンスタビライザー
- タンク安定化システム。
フィンスタビライザー
基本操作:
あなたは車の中で旅行している間にこれを試したことがありますか??
窓の盾を開き、車がある速度で前進している間に手のひらを道路に面して、すべての数字を前方に向けて渡し、指がまっすぐであることを確認してく
この状態では、あなたの手はまっすぐにとどまり、あなたの指の上または下の力に直面しませんこれは単に”ドラッグ”と呼ばれています。
1. 今少し上向きに指を持ち上げると、あなたの指の下にリフトがあり、あなたの手が上向きに行く傾向があることがわかりますこれは”リフト”と呼ばれ
2. すべての指を下に置くと、手の上にリフトプッシュ力があり、手が下に行く傾向があることがわかりますこれは”プッシュ”または”下向きリフト”
3と呼ばれています。 今、車を遅くし、速度を低下させ、あなたがリフトが表示されます上記の手順を繰り返し、ドラッグ速度が良好なリフトやプッシュを持っていることがより重要であることを意味し、力が大幅に減少し、プッシュします。
上記の技術は船で使用される航空機ホイルまたは水中翼船のひれの抗力、肯定的な上昇および否定的な上昇の基本を簡単に説明する。
フィンスタビライザー
–フィンの安定化力は、海を通る動き(抗力)と揚力によって生成され、”エアロフォイル”または水中翼形状の上下の水の流れによって作
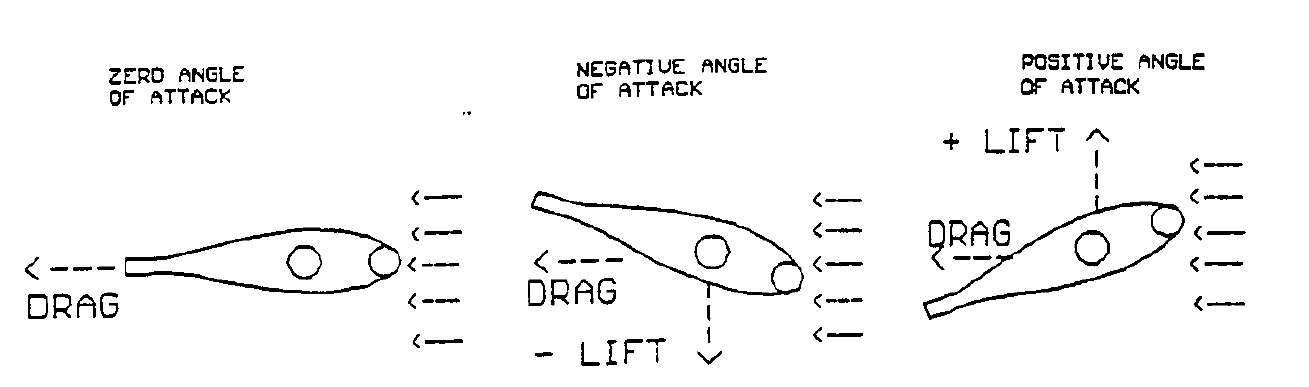
ゼロ迎え角:
–船の転がり動きがない場合、フィンは0°の角度にとどまり、上の図に示すようにフィンに揚力や押し力はありません。
負&正の迎え角:
–センサーによって感知される船が転がり始めるとすぐに、例えば船が安定した状態からポート側に転がると、ポートフィンが上向きに傾いている(負の迎え角)。 この力は、ポートサイドへのローリング運動をキャンセルするために船のポート側を持ち上げ、同時に右舷フィンが傾いている(迎え角が正)ので、船は右舷側に向かってプルを経験するこれら二つの力の合計は、ポート側に船を傾ける傾向がある波や風の力を打ち消す。
–今、船は右舷側に転がる傾向があり、上記の行動は単に右舷側に押し込み、左舷側に引きを提供するために反転されます。
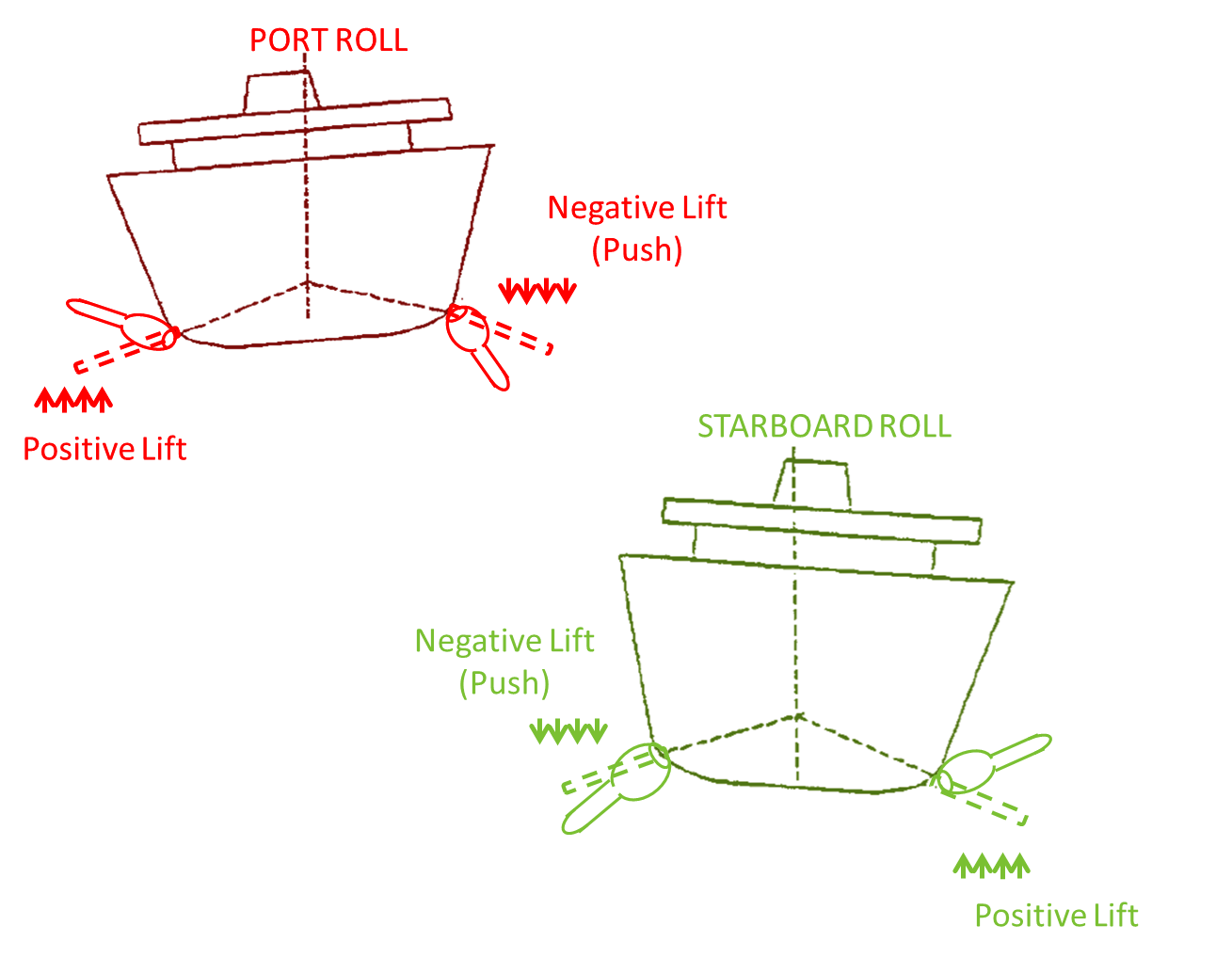
– ひれの前縁が傾くとき、プロフィールの上を渡る水流は持ち上がる圧力が下側に沿う流れによって提供される間、圧力の低下による上昇を作り出す。 フィンの前縁の下向きの傾きは、効果を反転させるので、下側で圧力の低下が起こり、上部で圧力が上昇して下向きの力を与える。
–船の前方移動(抗力)の合理的な速度がなければ、フィンは効果がありません。 従ってこれらの種類の活動的なひれの安定装置はより速いタイプの船に合い、多分十五またはより多くの結び目で作動する。
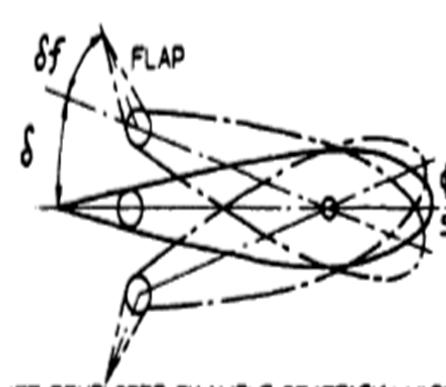
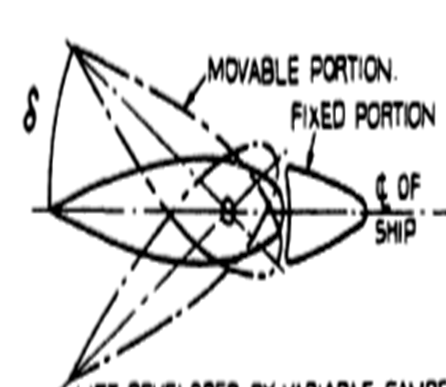
フィンの種類
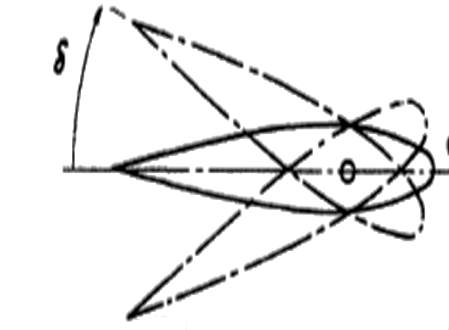
–水中翼部は、フラップの有無にかかわらず、全可動であってもよく、部分的に固定され、部分的に可動であってもよく、これらのフィンは、長波期にはロールと同相で、共振時には90°位相がずれ、短い期間にはロール加速度と同相で傾いている。
すべての可動面を備えたフィン
 すべての可動面を備えたフィン追加のテールフラップ付き
すべての可動面を備えたフィン追加のテールフラップ付き
固定構造のフィン
– 非引き込み式のひれは外皮内のスペースが限られているところに一般的である。 それらは通常ビルジの回転で合い、波止場の壁またはドックの底が付いている接触の危険を最小にするために船の側面からのまたは船の底の水平線の下の垂直線を越えて、写し出さない。
–フィンが強固に取り付けられているフィンシャフトは、船体に溶接またはボルトで固定された取付板の海腺を通過し、二つの実質的な軸受によって支
フィンの動きはどのように制御されますか?
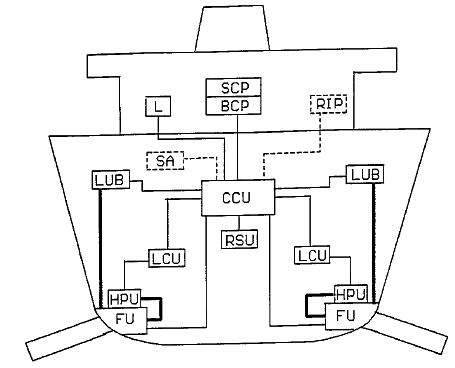
太いライン=油圧ライン、細いライン=電気ライン
SCP=SOLASのコントロールパネル、BCP=橋コントロールパネル、L=船の丸太、RIP=遠隔表示器のパネル、SA=船のオートメーション、LUB=円滑油のオイルタンク、CCU=中央制御の単位、RSU=ロールセンサーの単位、LCU=ローカル制御の単位、HPU=水力の単位、FU=ひれの単位。
–フィンの動きの制御は自動であり、通常、その最も単純な形で—速度制御–その軸athwartshipsと水平に取り付けられた一つの小さな、電気駆動ジャイロスコープに基づ
–船のロールの角速度によりジャイロスコープは速度に比例した量に集中させるばねに対して処理し、適した連結によって可変的な配達ポンプの制御を作動させるのに十分な力を提供するために油圧リレー単位によって水力で増幅される小さい力を発生させる。
–リンケージの一部はフィンシャフトに結合され、ポンプ制御にキャンセル信号を送信し、フィンをセンシングユニットが要求する傾斜角で静止させる。
–このタイプの制御は、通常は経済的な理由から小規模な設備に取り付けられることが多く、共振圧延に対して最も効果的です。
–船は純粋に共鳴モードで転がることはほとんどなく、海の状態はしばしば非常に混乱しています。 より精巧で高価な制御システムは、突然適用されたロール、共振から離れた期間での圧延、およびいくつかの波周波数の組み合わせから生じる条件での転
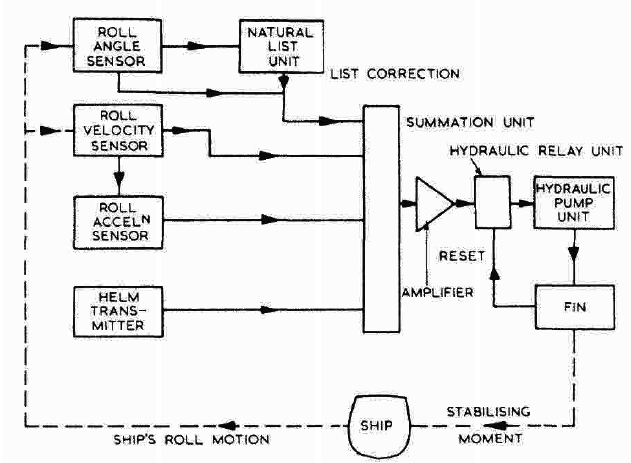
–垂直保持ジャイロをベースとしたセンシングユニットと速度ジャイロを微分および加算ユニットに結合したことにより、ロール角、ロール速度、ロール加速度から得られる複合関数によってフィンの動きを制御することができます。 “自然なリスト”の単位を加えることによって、安定はロールの平均ポイントについて達成され、従って推進力および安定力の要求を両方減らす。 これは補償された制御システムとして知られており、一般的に大規模な設備で使用されています。
RSUロールセンサーユニットの詳細(補償制御システム)
 –90%を超えるロール減少、普通30°out-to-out3°out-to-outよりより少しに減ることは共鳴で達成し、低い残りロールは頻度の広い範囲に保 しかし、安定化力は船の速度の二乗として変化するので、フィンは、彼らが唯一の追加のビルジキールとして機能する低またはゼロ速度で最も効果的で
–90%を超えるロール減少、普通30°out-to-out3°out-to-outよりより少しに減ることは共鳴で達成し、低い残りロールは頻度の広い範囲に保 しかし、安定化力は船の速度の二乗として変化するので、フィンは、彼らが唯一の追加のビルジキールとして機能する低またはゼロ速度で最も効果的で