こんにちはオタク、ここでは、誘導近接センサの動作原理、業界での幅広い広がりのアプリケーションと商業目的のための使こんにこんにつこについて説明します。こんにちは、誘導近接センサの動作原理を説明します。 このブログでは、誘導近接センサの背後にある技術と詳細な仕様に焦点を当てています。
誘導近接センサとは何ですか?
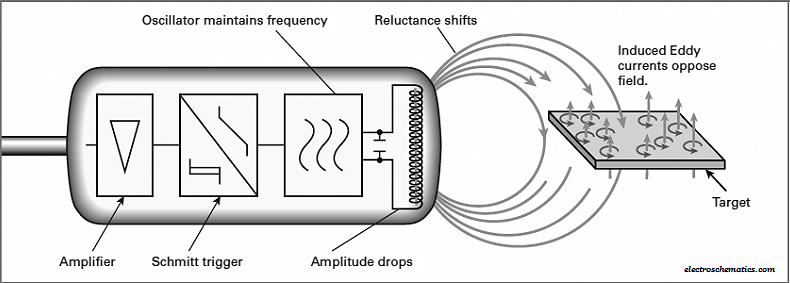
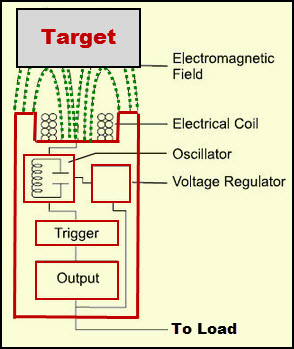
 誘導近接センサは、アクティブ側の隣に存在する金属物体を検出します。 このセンサは、変動する電流がターゲット物体に起電力(EMF)を誘導するインダクタンスの電気的プリンシパルの下で動作します。 これらの非接触近さセンサーは鉄ターゲット、理想的に厚い穏やかな鋼鉄より1ミリメートルを検出する。 これらは、コイル付きフェライトコア、発振器、シュミットトリガ、および出力アンプの四つの主要な部品で構成されています。 このセンサーに2つの主要な版があり、あります,
誘導近接センサは、アクティブ側の隣に存在する金属物体を検出します。 このセンサは、変動する電流がターゲット物体に起電力(EMF)を誘導するインダクタンスの電気的プリンシパルの下で動作します。 これらの非接触近さセンサーは鉄ターゲット、理想的に厚い穏やかな鋼鉄より1ミリメートルを検出する。 これらは、コイル付きフェライトコア、発振器、シュミットトリガ、および出力アンプの四つの主要な部品で構成されています。 このセンサーに2つの主要な版があり、あります,
- シールドなし:コイルによって発生する電磁場は無制限であり、より広く、より大きい感知の間隔を可能にする
- は保護した: 発生する電磁場は、センサコイルの側面が覆われている前面に集中しています
必読:
- 近接センサの種類
- 静電容量式近接センサ
- 近接センサの仕組みは?
誘導近接センサの動作原理
発振器は、フェライトコアとコイルアレイからセンシング面で放射する対称的な振動磁界を作成します。 鉄ターゲットがこの磁界に入るとき、金属の表面で引き起こされる小さい独立した電流(渦電流)。
誘導近接センサの周波数範囲は、acでは10-20Hz、dcでは500Hz-5kHzです。 磁界の限定のために、誘導センサーにミリメートルの一部分からの平均の60のmmにのような比較的狭い感知の範囲がある。
これにより、電磁界振幅を減少させるセンサに負荷が発生します。 金属物体が近接センサに向かって移動すると、それに応じて渦電流が増加します。 したがって、発振器の負荷が増加し、電界振幅が減少します。
schmitt triggerブロックは発振器の振幅を監視し、特定のレベル(所定のレベル)でトリガ回路はセンサのオンまたはオフを切り替えます。 金属物体またはターゲットが近接センサから離れて移動すると、発振器の振幅が増加します。
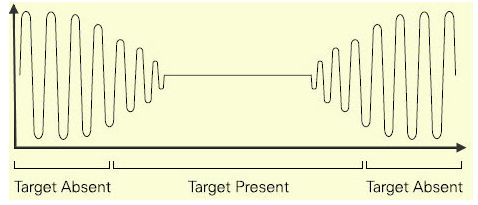
上の画像は、ターゲットの存在下およびターゲットの非存在下での誘導性近接センサ発振器の波形を示しています。
今日では、誘導近接センサは、異なる動作電圧で利用可能です。 これらの誘導の近さセンサーはAC、DCおよびAC/DCモード(普遍的なモード)で利用できる。 近接センサ回路の動作範囲は、10V~320V DCおよび20V~265V ACです。
誘導近接センサの利点
- 非接触検出
- 環境適応性-ほこりや汚れなどの工業地域で見られる一般的な条件に耐性
- 金属センシングで可能で汎用性
- 高スイッチングレート
- 可動部品がなく、長寿命を確保
誘導近接センサの欠点
- 検出範囲が不足し、平均最大60mm
- 金属物体のみを検出できます
- 極端な温度のような外部条件, 切削液または化学物質は、センサの性能に影響を与えます。
誘導の近さセンサーの適用
- 機械通行料、一貫作業、自動車産業
- 粗い環境の金属部分の検出
- 高速可動部分
この記事が完全な誘導の近さセンサー
Robu.in あなたはそれが面白い発見し、あなたが私たちの教育ブログの多くのために戻ってくることを願っています。