Scheepsstabilisatoren en stabilisatiesystemen
een schip op zee heeft zes vrijheidsgraden, d.w.z.
1. Draaien, 2. Hijsen, 3. Pitch, 4. Gieren, 5. Sway, 6. Stijging.
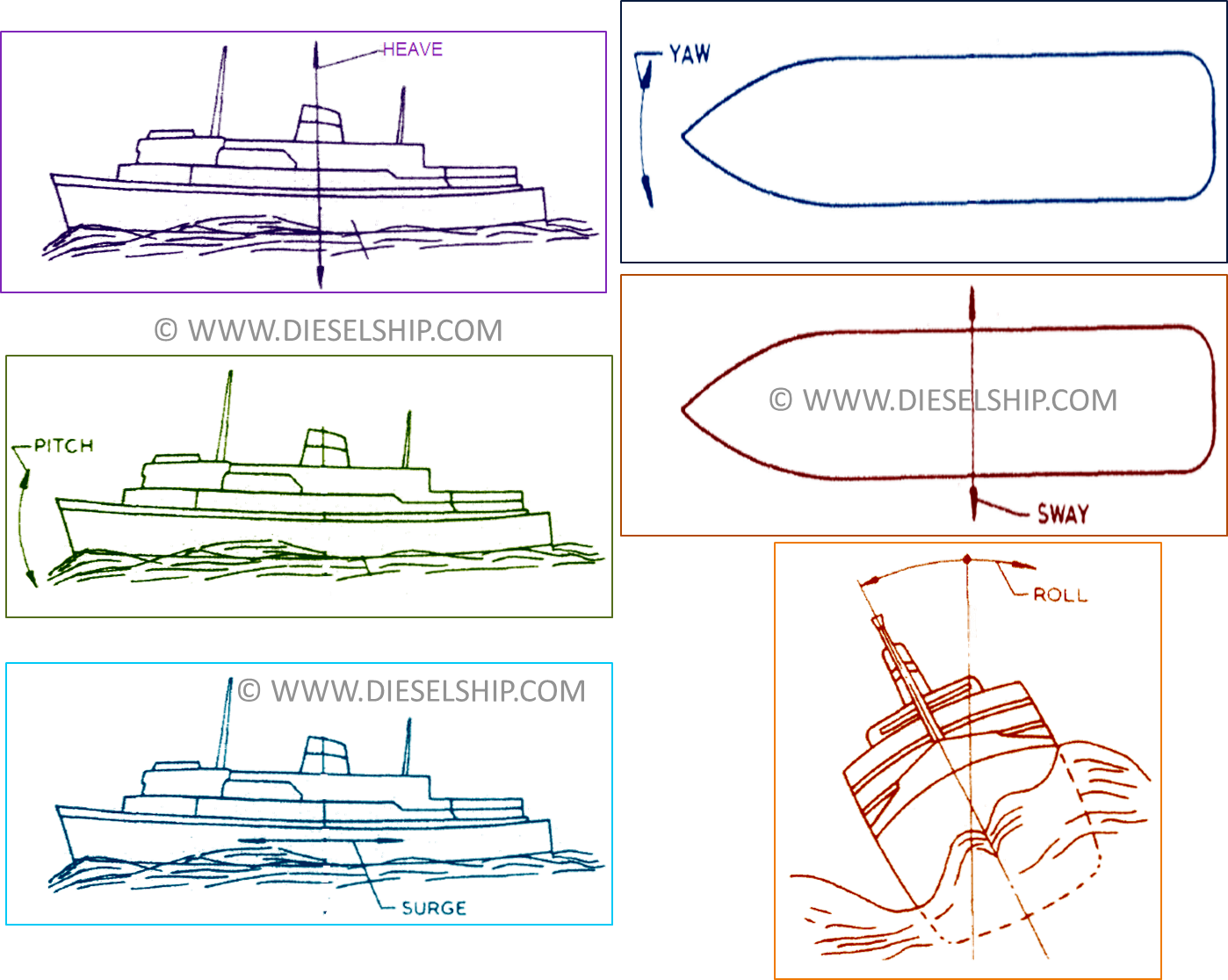
– van al deze bewegingen kan alleen de rolbeweging in de praktijk effectief worden verminderd door het aanbrengen van bilge kielen, anti-roltanks of Stabilisatoren.
– op een schip is een stabilisatiesysteem aangebracht om de rolbeweging te verminderen. Dit wordt bereikt door het leveren van een tegenovergestelde kracht aan die beweging proberen om het schip te rollen.
– op schepen worden twee basisstabilisatiesystemen gebruikt;
- de Fin Stabilisatoren
- tankstabilisatiesysteem.
fin Stabilisatoren
basiswerking:
heeft u dit ooit geprobeerd terwijl u in een auto reist??
Open het scherm van het raam en leg al uw figuren samen naar voren gericht met de handpalm naar de weg terwijl de auto in voorwaartse beweging is met enige snelheid en zorg ervoor dat uw vingers recht zijn.
bij deze voorwaarde blijft uw hand recht en wordt u niet geconfronteerd met een kracht boven of onder uw vingers dit wordt simpelweg een ‘Drag’genoemd.
1. Til nu lichtjes je vingers omhoog en je zult zien dat er een lift onder je vingers is en je hand zal de neiging hebben om omhoog te gaan, dit wordt een ‘lift’genoemd.
2. Leg nu al je vingers naar beneden je zult zien dat er een liftdruk op je hand is en je hand zal geneigd zijn naar beneden te gaan dit wordt een ‘push’ of ‘Downward lift’
3 genoemd. Nu vertragen de auto en de snelheid te verminderen en herhaal de bovenstaande stappen u zult zien dat de lift en duw kracht is aanzienlijk verminderd, wat betekent dat de sleepsnelheid is belangrijker om een goede lift of een duw.
de bovenstaande techniek verklaart eenvoudig de basis van Drag, positieve lift en negatieve lift van een aerofolie of Draagvleugelvleugelvinnen die op schepen worden gebruikt.
Vinstabilisatoren
– het stabiliserende vermogen van vinnen wordt gegenereerd door hun beweging door de zee (trekkracht) en lift’ gecreëerd door de stroming van water boven en onder de vleugels of draagvleugelvleugel.
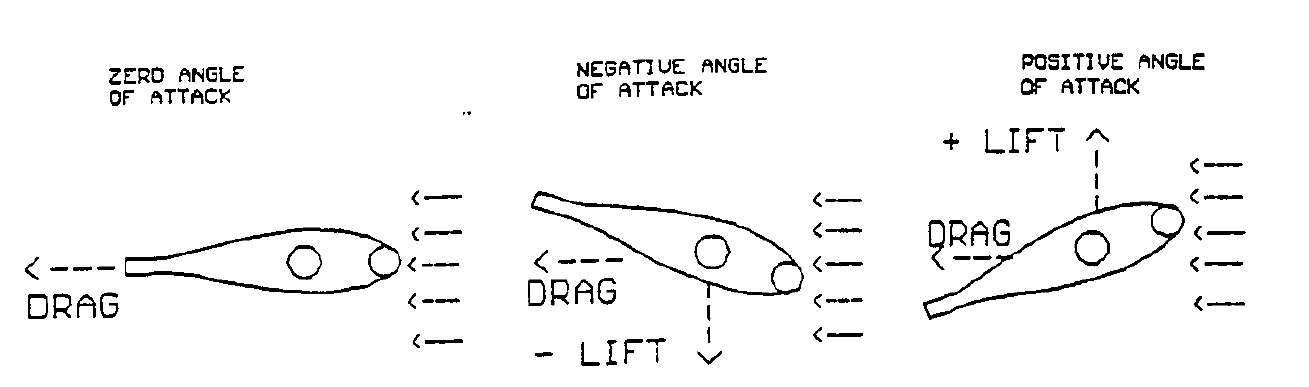
nul aanvalshoek:
– wanneer het schip niet rolt, blijven de vinnen onder een hoek van 0o en wordt er geen hef-of duwkracht aan de vinnen geboden, zoals aangegeven in bovenstaande figuur.
negatief & positieve aanvalshoek:
– zodra het schip begint te rollen, wat wordt waargenomen door de sensoren, bijvoorbeeld het schip rolt van stabiele toestand naar bakboordzijde, wordt de bakboordvin naar boven gekanteld (negatieve aanvalshoek), die een negatieve lift ervaart, d.w.z. de vin een lift van de bodem of een duw van de bodem. Deze kracht tilt de bakboordzijde van het schip op om de rollende beweging naar bakboordzijde te annuleren en tegelijkertijd wordt de stuurboordvin naar beneden gekanteld (positieve aanvalshoek) en daardoor ervaart het schip een trek naar stuurboordzijde de som van deze twee krachten gaat de golf-of windkracht tegen die het schip naar bakboordzijde neigt te kantelen.
– nu heeft het schip de neiging naar stuurboord te rollen en de bovenstaande actie is gewoon omgekeerd om een duw aan stuurboord en een trek aan bakboord te bieden.
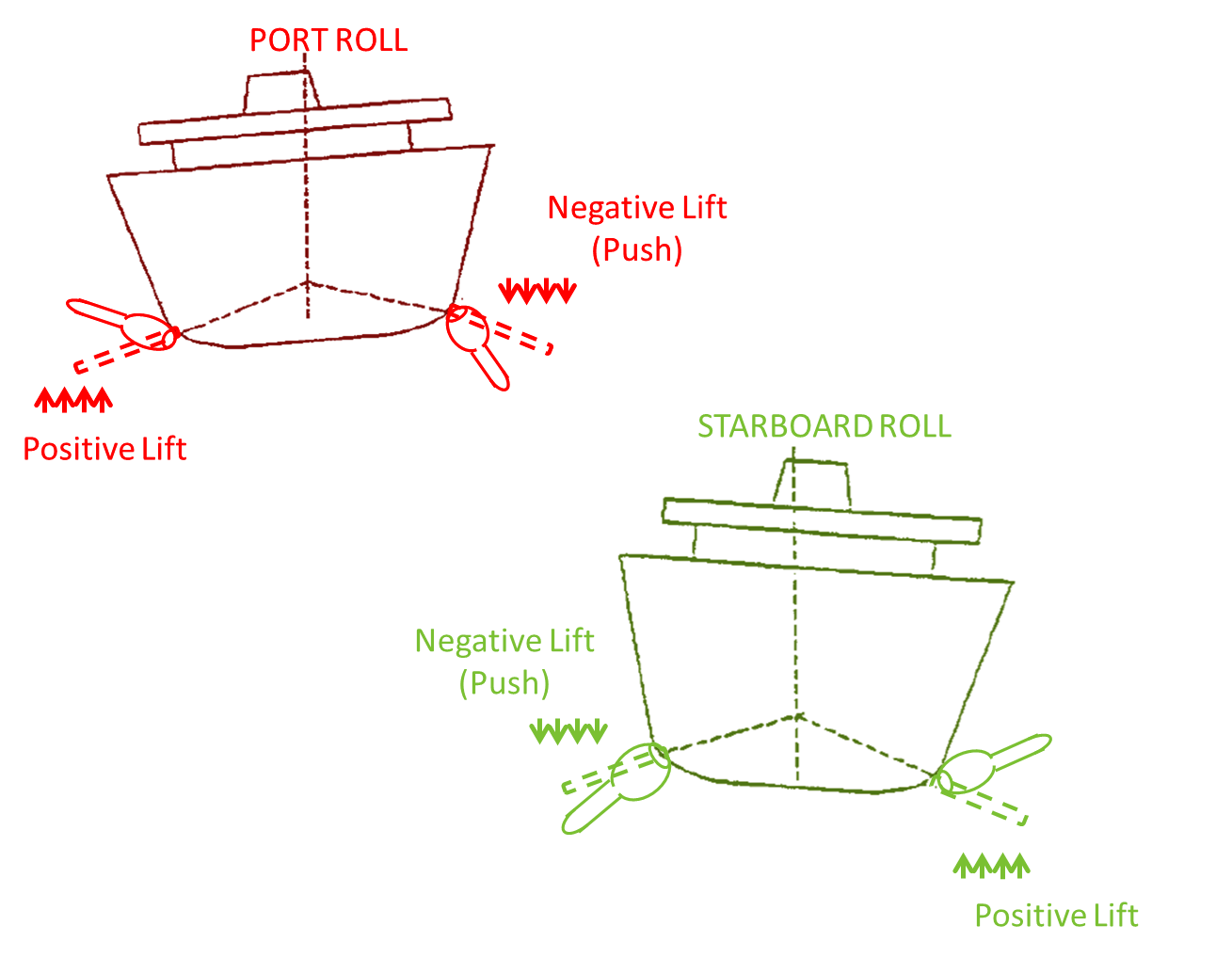
– wanneer de voorrand van de vin omhoog wordt gekanteld, veroorzaakt de waterstroom over de bovenkant van het profiel lift door een drukdaling, terwijl een hijsdruk door Stroom langs de onderzijde wordt verstrekt. Naar beneden kantelen van de voorste rand van de vin, keert het effect, zodat een daling van de druk optreedt aan de onderzijde en verhoogde druk aan de bovenkant om een neerwaartse kracht te geven.
– zonder een redelijke voorwaartse beweging (slepen) van het schip zijn de vinnen niet effectief. Zo worden dit soort actieve vinstabilisatoren aangebracht op de snellere scheepstypen, die bij misschien vijftien of meer knopen werken.
Type vinnen
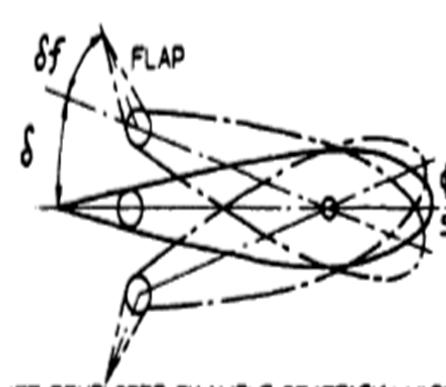
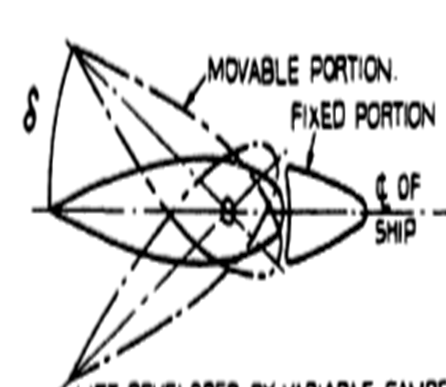
– het draagvlechtgedeelte kan geheel beweegbaar zijn, met of zonder kleppen of gedeeltelijk vast, gedeeltelijk beweegbaar; deze vinnen worden gewoonlijk hydraulisch gekanteld in fase met de rol bij lange golfperioden, 90° uit fase bij resonantie en in fase met rolversnelling bij korte perioden.
Vinnen met alle roerende oppervlak
 Vinnen met alle roerende oppervlak met extra staartflap
Vinnen met alle roerende oppervlak met extra staartflap
Vinnen met een vaste structuur:
– Niet-intrekbare vinnen worden vaak gebruikt op plaatsen waar de ruimte in de romp is beperkt. Ze worden gewoonlijk aangebracht bij het draaien van de lensruimte en steken niet verder uit dan de verticale lijn van de scheepszijde of onder de horizontale lijn van de scheepsbodem, om het risico van contact met een kadewand of de dokbodem tot een minimum te beperken.
– De fin as, waarop de fin is strak aangesloten, gaat door een zee klier in een montage plaat gelast of gebout aan de romp en wordt ondersteund door twee grote lagers, Een double-ended hendel ingevoerd om het binnenste uiteinde van de vin as wordt aangedreven door hydraulische cilinders geleverd door een elektrisch aangedreven variabele levering van de pomp.
Hoe wordt de vinbeweging gecontroleerd?
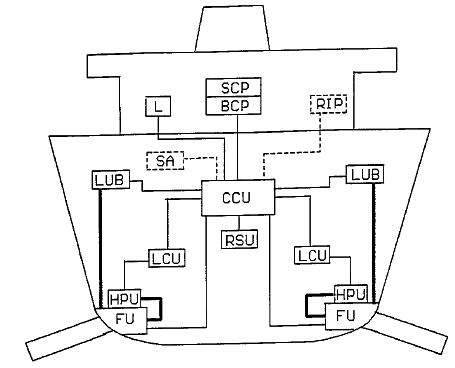
dikkere leidingen = hydraulische leidingen; dunnere leidingen = elektrische leidingen
SCP = Solas Control panel, BCP = Bridge Control Panel, L = Ship ’s Log, RIP = Remote Indicator Panel, SA = Ship’ s Automation, LUB = Lube olietank, CCU = Central Control Unit, RSU = Roll sensor Unit, LCU = Local Control unit, HPU = Hydraulic Power Unit, FU = Fin Unit.
– controle van de beweging van vinnen is automatisch en wordt meestal afgeleid van gyroscopische sensorapparatuur die, in zijn eenvoudigste vorm — snelheidsregeling – is gebaseerd op een kleine, elektrisch aangedreven gyroscoop horizontaal gemonteerd met zijn as aan boord.
– de hoeksnelheid van het schip zorgt ervoor dat de gyroscoop tegen centraliserende veren werkt tot een hoeveelheid die evenredig is met de snelheid en genereert een kleine kracht die hydraulisch wordt versterkt door een hydraulische relais om voldoende vermogen te leveren om de bedieningsorganen van de pomp met variabele overbrenging via een geschikte koppeling te bedienen.
– een deel van de koppeling is aan de Vinas gekoppeld om een afknellingssignaal naar de pompbesturing door te geven en de vin tot rust te brengen onder de door de sensor vereiste hellingshoek.
– dit type regelaar wordt vaak in kleine installaties gemonteerd, meestal om economische redenen, en is het meest effectief tegen resonantwalsen.
– Schepen rollen zelden in een zuiver resonante modus; de toestand van de zee is vaak zeer verward. Er zijn uitvoeriger en duurdere regelsystemen nodig voor het plotseling aanbrengen van walsen, het walsen in perioden van resonantie en het walsen in omstandigheden die voortvloeien uit de combinatie van verschillende golffrequenties.
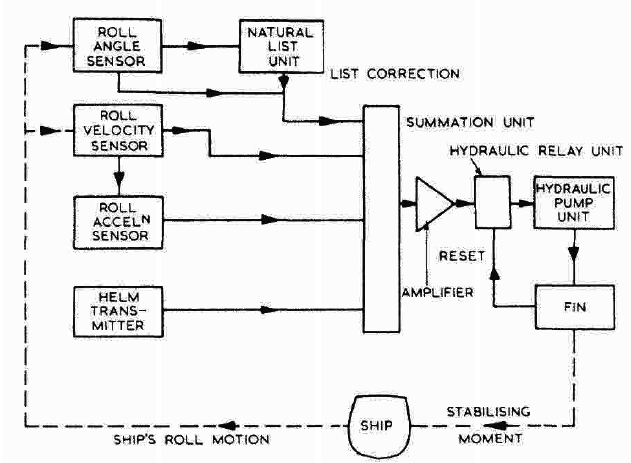
– een sensoreenheid gebaseerd op een verticale keeping gyroscoop en een snelheidsgyroscoop gekoppeld aan differentieerings-en sommatie-eenheden maakt het mogelijk de vinbeweging te regelen door middel van een samengestelde functie afgeleid van rolhoek, rolsnelheid en rolversnelling. Door toevoeging van een “natuurlijke lijst” – eenheid wordt stabilisatie bereikt over het gemiddelde rolpunt en vermindert zo zowel de aandrijving als de stabiliserende vraag naar vermogen. Dit staat bekend als een compensated control system en wordt over het algemeen gebruikt in grote installaties.
RSU-Roll Sensor Unit in Detail (Compensated control system)
 – Roll reductie van meer dan 90%, meestal 30° out-to-out verminderd tot minder dan 3° out-to-out, kan worden bereikt bij resonantie en lage resterende rollen kunnen worden gehandhaafd over een breed scala van frequenties. Aangezien het stabiliserende vermogen echter varieert als het kwadraat van de snelheid van het schip, zijn vinnen het minst effectief bij lage of nulsnelheid, waar ze alleen functioneren als extra kielen.
– Roll reductie van meer dan 90%, meestal 30° out-to-out verminderd tot minder dan 3° out-to-out, kan worden bereikt bij resonantie en lage resterende rollen kunnen worden gehandhaafd over een breed scala van frequenties. Aangezien het stabiliserende vermogen echter varieert als het kwadraat van de snelheid van het schip, zijn vinnen het minst effectief bij lage of nulsnelheid, waar ze alleen functioneren als extra kielen.