Stabilizatory okrętowe i systemy stabilizujące
statek na morzu ma sześć stopni swobody, tj.
1. Roll, 2. Heave, 3. Pitch, 4. Yaw, 5. Sway, 6. Przepięcie.
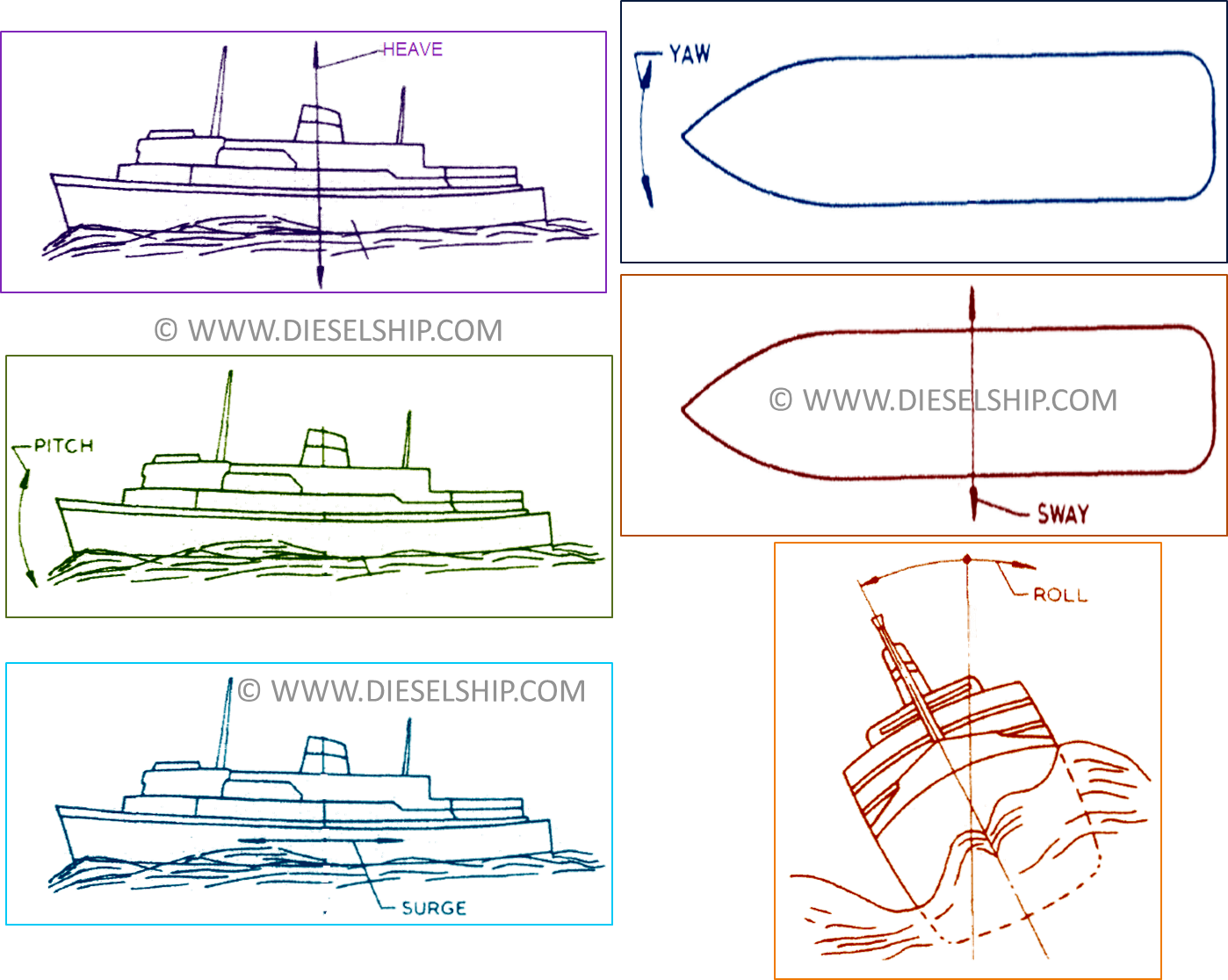
– spośród wszystkich tych ruchów, tylko ruch toczny można skutecznie zmniejszyć w praktyce poprzez zamontowanie stępek zęzowych, zbiorników przeciwpowodziowych lub stabilizatorów.
– na statku zamontowano układ stabilizujący w celu zmniejszenia ruchu toczenia. Osiąga się to poprzez dostarczenie siły przeciwnej do tego ruchu, który próbuje przetoczyć statek.
- stabilizatory płetw
- system stabilizacji zbiornika.
Stabilizatory płetw
Podstawowa obsługa:
czy kiedykolwiek próbowałeś tego podczas podróży samochodem??
otwórz osłonę okna i połóż wszystkie swoje figury razem zwrócone w kierunku do przodu, z dłonią skierowaną w stronę drogi, podczas gdy samochód porusza się do przodu z pewną prędkością i upewnij się, że palce są proste.
w tym stanie twoja ręka pozostanie prosta i nie napotkasz żadnej siły powyżej lub poniżej palców.
1. Teraz lekko podnieś palce do góry, a zobaczysz, że pod palcami znajduje się podnośnik, a twoja ręka będzie miała tendencję do poruszania się w górę, co nazywa się „podnoszeniem”.
2. Teraz połóż wszystkie palce w dół, zobaczysz, że na górze dłoni znajduje się siła pchania, a twoja ręka będzie miała tendencję do opadania w dół, to się nazywa „pchanie” lub „podnoszenie w dół”
3. Teraz zwolnij samochód i zmniejsz prędkość i powtórz powyższe kroki zobaczysz, że siła podnoszenia i pchania jest znacznie zmniejszona, co oznacza, że prędkość oporu jest ważniejsza, aby mieć dobry podnośnik lub pchanie.
powyższa technika po prostu wyjaśnia podstawy przeciągania, dodatniego podnoszenia i ujemnego podnoszenia płetw powietrznych lub wodolotów, które są używane na statkach.
stabilizatory płetw
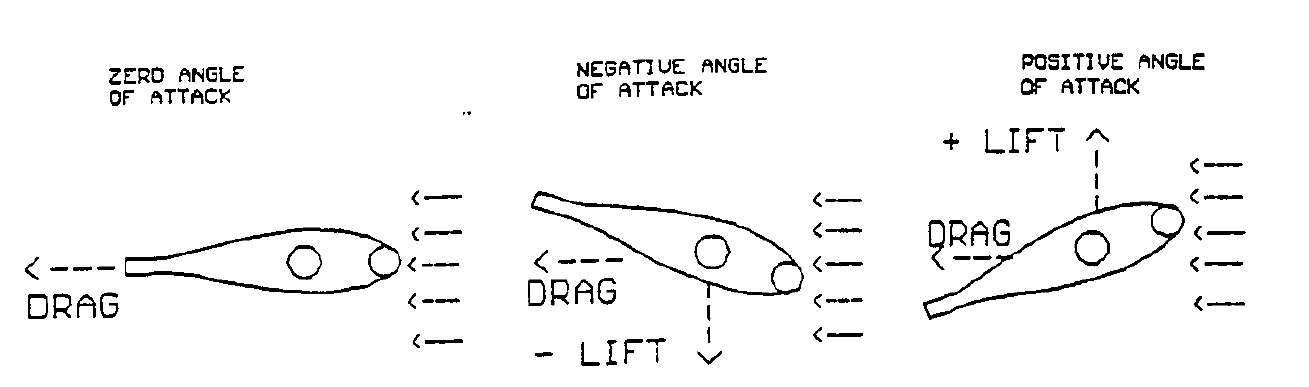
zerowy kąt natarcia:
– gdy nie ma żadnego ruchu tocznego statku, płetwy pozostają pod kątem 0o i nie ma siły podnoszenia ani pchania oferowanej płetwom, jak pokazano na rysunku powyżej.
ujemny & dodatni kąt natarcia:
– teraz statek ma tendencję do toczenia się na prawą burtę, a powyższe działanie jest po prostu odwrócone, aby zaoferować pchnięcie na prawą burtę i pociągnięcie na lewą burtę.
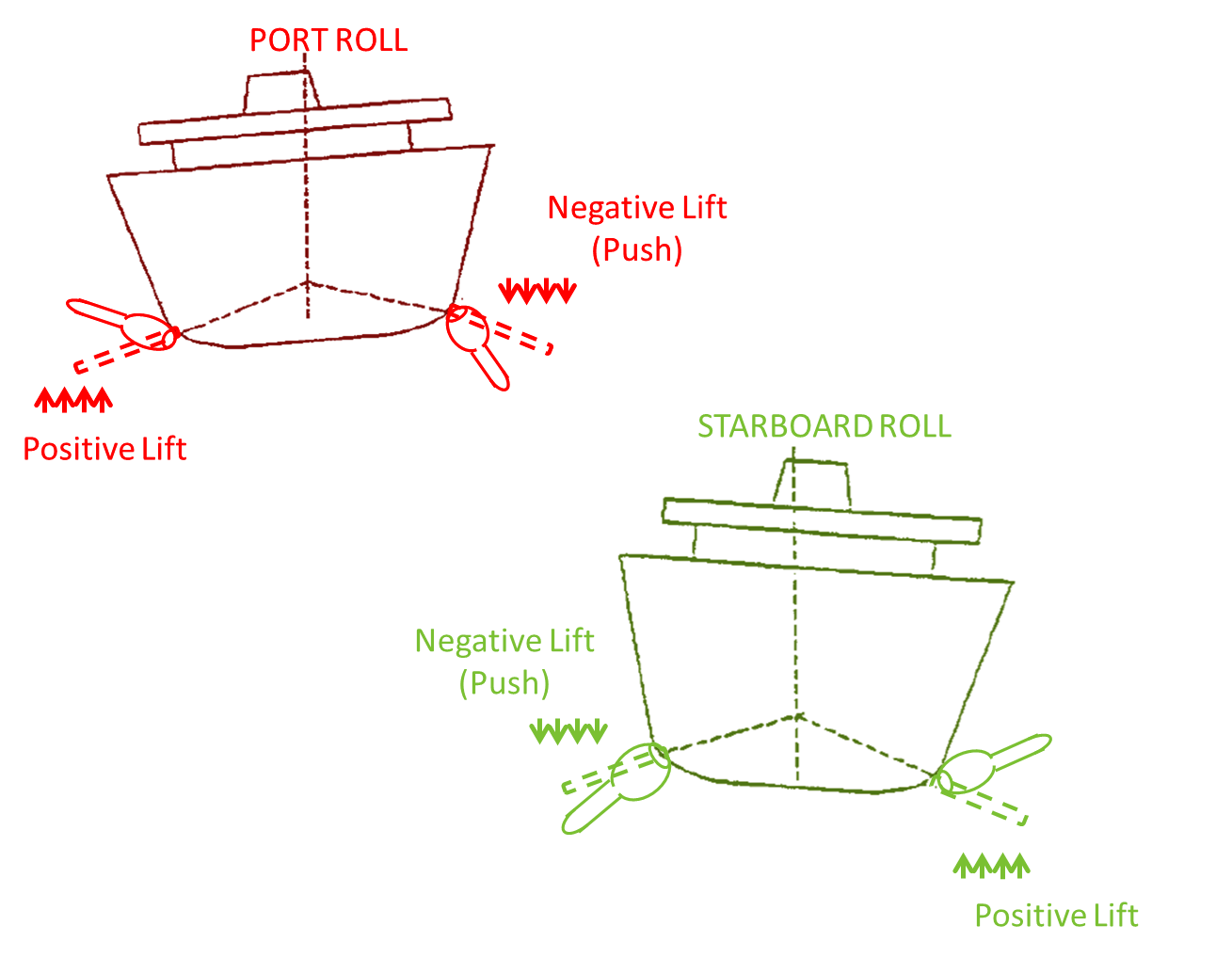
– gdy przednia krawędź PŁETWY jest przechylona do góry, przepływ wody przez górną część profilu powoduje uniesienie ze względu na spadek ciśnienia, podczas gdy ciśnienie podnoszenia jest zapewniane przez przepływ wzdłuż spodu. Pochylenie w dół przedniej krawędzi płetwy odwraca efekt, tak że spadek ciśnienia występuje na spodzie i zwiększone ciśnienie na górze, aby dać siłę w dół.
– bez rozsądnego tempa ruchu do przodu (przeciągnięcia) statku, płetwy są nieskuteczne. Tak więc tego rodzaju aktywne stabilizatory płetwowe są montowane na szybszych typach statków, pracujących z prędkością może piętnastu lub więcej węzłów.
Typ płetw
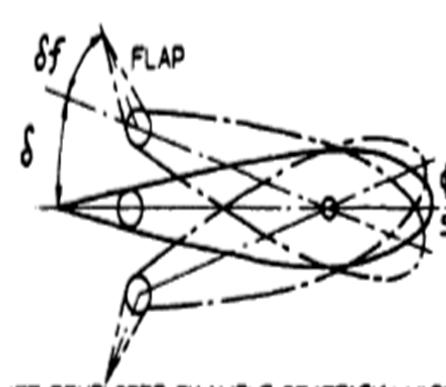
Płetwy z ruchomą powierzchnią
 Płetwy z ruchomą powierzchnią z dodatkową klapą ogonową
Płetwy z ruchomą powierzchnią z dodatkową klapą ogonową
płetwy o stałej strukturze
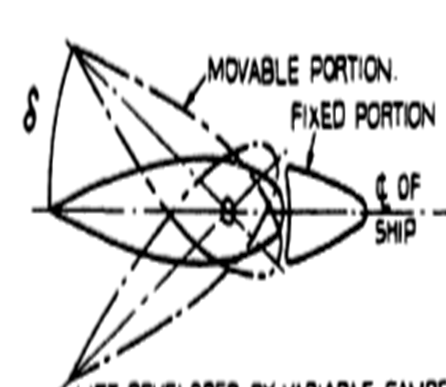
– płetwy Nie chowane są powszechnie stosowane tam, gdzie przestrzeń wewnątrz kadłuba jest ograniczona. Są one zazwyczaj montowane na zakręcie zęzy i nie wystają poza linię pionową od strony statku lub poniżej linii poziomej dna statku, aby zminimalizować ryzyko kontaktu ze ścianą nabrzeża lub dnem doku.– 7956 >
-wał płetwy, do którego płetwa jest sztywno przymocowana, przechodzi przez dławik morski w płycie montażowej spawanej lub przykręconej do kadłuba i jest wsparty na dwóch znaczących łożyskach, dźwignia dwustronna przymocowana do wewnętrznego końca wału PŁETWY jest uruchamiana przez siłowniki hydrauliczne zasilane z napędzanej elektrycznie zmiennej pompy zasilającej.
jak kontrolowany jest ruch płetwy?
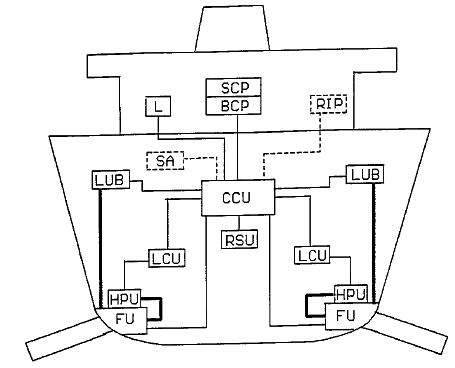
grubsze linie = linie hydrauliczne; cieńsze linie = linie elektryczne
SCP = panel sterowania SOLAS, BCP = Panel sterowania mostkiem, L = dziennik okrętowy, RIP = zdalny Panel wskaźników, SA = Automatyka okrętowa, LUB = Zbiornik Oleju Smarowego , CCU = centralna jednostka sterująca, RSU = jednostka czujnika rolkowego, LCU = lokalna Jednostka Sterująca, HPU = hydrauliczna jednostka napędowa, FU = Jednostka Fin.
— sterowanie ruchem PŁETWY jest automatyczne i zwykle wywodzi się z żyroskopu, który w najprostszej postaci – kontroli prędkości-opiera się na jednym małym, napędzanym elektrycznie żyroskopie zamontowanym poziomo z jego osiami.
– prędkość kątowa toczenia statku powoduje, że żyroskop przetwarza na sprężyny centrujące do ilości proporcjonalnej do prędkości i generuje niewielką siłę, która jest hydraulicznie wzmacniana przez hydrauliczny przekaźnik, aby zapewnić moc wystarczającą do obsługi elementów sterujących zmiennej pompy zasilającej za pośrednictwem odpowiedniego połączenia.– 7956 >
– część łącznika jest sprzężona z wałem płetwy, aby przesłać sygnał anulujący do sterownika pompy i doprowadzić płetwę do spoczynku pod kątem nachylenia wymaganym przez czujnik.
– ten typ sterowania jest często montowany w małych instalacjach, zwykle ze względów ekonomicznych, i jest najbardziej skuteczny w walce z toczeniem rezonansowym.
– statki rzadko toczą się w trybie czysto rezonansowym; Stan morza jest często mocno zdezorientowany. Bardziej rozbudowane i droższe systemy sterowania są wymagane do radzenia sobie z nagłym przyłożeniem rolki, toczenia w okresach poza rezonansem i toczenia w warunkach wynikających z połączenia kilku częstotliwości fal.
– Jednostka czujnikowa oparta na żyroskopie pionowym i żyroskopie prędkości sprzężonym w jednostki różnicujące i sumujące umożliwia sterowanie ruchem płetwy za pomocą złożonej funkcji pochodzącej z kąta rolki, prędkości rolki i przyspieszenia rolki. Dodając jednostkę „naturalnej listy”, stabilizację uzyskuje się o średnim punkcie toczenia, a tym samym zmniejsza zarówno napęd, jak i zapotrzebowanie na moc stabilizującą. Jest to znany jako skompensowany system sterowania i jest zwykle stosowany w dużych instalacjach.
RSU-Roll Sensor Unit in Detail (Compensated control system)
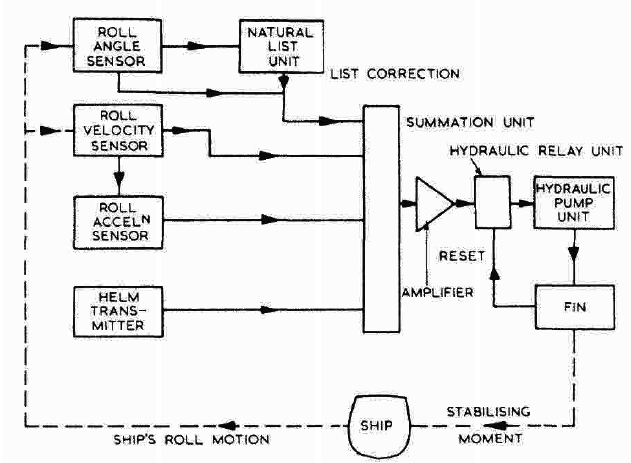 – redukcja rolek przekraczająca 90%, zazwyczaj 30° out-to-out zredukowana do mniej niż 3° out-to-out, może być osiągnięta przy rezonansie i niskie rolki resztkowe mogą być utrzymywane w szerokim zakresie częstotliwości. Ponieważ jednak moc stabilizująca zmienia się w zależności od kwadratu prędkości statku, płetwy są najmniej skuteczne przy niskiej lub zerowej prędkości, gdzie działają tylko jako dodatkowe stępki zęzowe.
– redukcja rolek przekraczająca 90%, zazwyczaj 30° out-to-out zredukowana do mniej niż 3° out-to-out, może być osiągnięta przy rezonansie i niskie rolki resztkowe mogą być utrzymywane w szerokim zakresie częstotliwości. Ponieważ jednak moc stabilizująca zmienia się w zależności od kwadratu prędkości statku, płetwy są najmniej skuteczne przy niskiej lub zerowej prędkości, gdzie działają tylko jako dodatkowe stępki zęzowe.