ARTIKKEL
Pete Millett

Få verdifulle ressurser rett til innboksen din-sendt ut en gang per måned
Vi verdsetter ditt personvern
Innledning
Mange bevegelseskontrollapplikasjoner bruker permanentmagnet DC-motorer. Siden det er enklere å implementere styringssystemer ved HJELP AV LIKESTRØMSMOTORER sammenlignet MED VEKSELSTRØMSMOTORER, brukes de ofte når hastighet, dreiemoment eller posisjon må styres.
DET finnes to typer VANLIGE DC-motorer: Børstede motorer og børsteløse motorer (ELLER BLDC-motorer). SOM deres navn antyder, DC børstet motorer har børster, som brukes til å kommutere motoren for å få den til å spinne. Børsteløse motorer erstatter den mekaniske kommutasjonsfunksjonen med elektronisk styring.
i mange applikasjoner kan enten en børstet ELLER børsteløs DC-motor brukes. De fungerer basert på de samme prinsippene om tiltrekning og avstøtning mellom spoler og permanente magneter. Begge har fordeler og ulemper som kan føre til at du velger en over den andre, avhengig av søknaden din krav.
Dc-Børstede Motorer
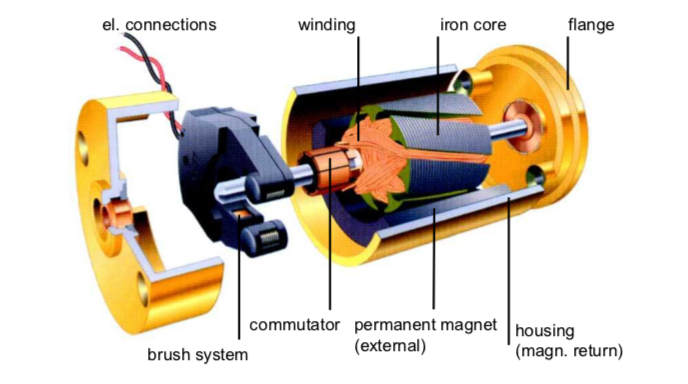
Dc-Børstede Motorer (bilde av maxon group)
DC-motorer bruker viklede trådspoler for å skape et magnetfelt. I en børstet motor er disse spolene frie til å rotere for å drive en aksel-de er den delen av motoren som kalles «rotor». Vanligvis vikles spolene rundt en jernkjerne, selv om det også er børstede motorer som er «kjerneløse», hvor viklingen er selvbærende.
den faste delen av motoren kalles «stator». Permanente magneter brukes til å gi et stasjonært magnetfelt. Normalt er disse magnetene plassert på statorens indre overflate, utenfor rotoren.
for å skape dreiemoment, som gjør rotoren spinn, må rotorens magnetfelt kontinuerlig rotere, slik at det er felt som tiltrekker og avviser statorens faste felt. For å få feltet til å rotere, brukes en glidende elektrisk bryter. Bryteren består av kommutatoren, som vanligvis er en segmentert kontakt montert på rotoren, og faste børster som er montert på statoren.
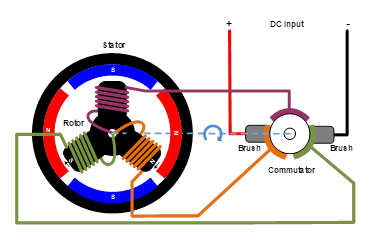
når rotoren svinger, slås forskjellige sett med rotorviklinger konstant på og av av kommutatoren. Dette fører til at rotorens spoler stadig tiltrekkes og avstøtes fra statorens faste magneter, noe som gjør rotoren spinn.
siden det er noe mekanisk friksjon mellom børstene og kommutatoren – og siden det er en elektrisk kontakt, kan den vanligvis ikke smøres – er det mekanisk slitasje på børstene og kommutatoren over motorens levetid. Denne slitasje vil til slutt nå et punkt der motoren ikke lenger fungerer. Mange børstede motorer – spesielt store-har utskiftbare børster, vanligvis laget av karbon, som er designet for å opprettholde god kontakt som slitasje. Disse motorene krever periodisk vedlikehold. Selv med utskiftbare børster, til slutt bærer kommutatoren også til det punktet at motoren må byttes ut.
FOR å drive en børstet motor, PÅFØRES LIKESPENNING over børstene, som passerer strøm gjennom rotorviklingene for å få motoren til å spinne.
i tilfeller der rotasjon bare er nødvendig i en retning, og hastighet eller dreiemoment ikke trenger å styres, er det ikke nødvendig med drivelektronikk for en børstet motor. I applikasjoner som dette er LIKESPENNINGEN ganske enkelt slått på og av for å få motoren til å kjøre eller stoppe. Dette er typisk i lavprisapplikasjoner som motoriserte leker. Hvis reversering er nødvendig, kan det oppnås ved hjelp av en dobbel polet bryter.
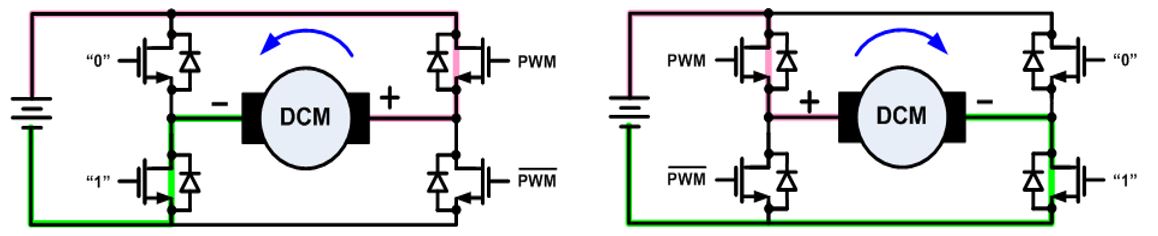
for å lette kontrollen av hastighet, dreiemoment og retning, brukes en «H-bro» bestående av elektroniske brytere – transistorer, Igbt eller Mosfet – for å tillate motoren å bli drevet i begge retninger. Dette gjør at spenningen kan påføres motoren i enten polaritet, noe som gjør at motoren roterer i motsatt retning. Motorhastigheten eller dreiemomentet kan styres av pulsbreddemodulering av en av bryterne.
Børsteløse DC-Motorer
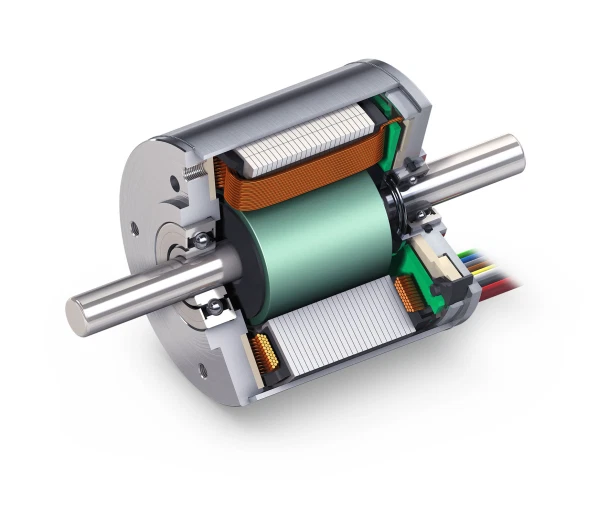
Børsteløse DC-Motorer (bilde av maxon group)
Børsteløse DC-motorer opererer på samme prinsipp for magnetisk tiltrekning og avstøtning som børstemotorer, men de er konstruert noe annerledes. I stedet for en mekanisk kommutator og børster roteres statorens magnetfelt ved hjelp av elektronisk kommutasjon. Dette krever bruk av aktiv kontrollelektronikk.
i en børsteløs motor har rotoren permanente magneter festet til den, og statoren har viklinger. Børsteløse motorer kan bygges med rotoren på innsiden, som vist ovenfor, eller med rotoren på utsiden av viklingene(noen ganger kalt en» outrunner » – motor).
antall viklinger som brukes i en børsteløs motor kalles antall faser. Selv om børsteløse motorer kan bygges med forskjellige antall faser, er trefasede børsteløse motorer de vanligste. Et unntak er små kjølevifter som kan bruke bare en eller to faser.
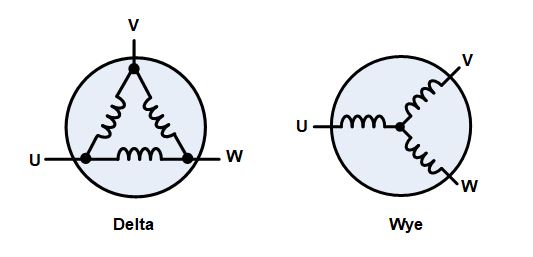
de tre viklingene til en børsteløs motor er koblet i enten en» stjerne «eller en» delta » – konfigurasjon. I begge tilfeller er det tre ledninger som kobler til motoren, og drivteknikken og bølgeformen er identiske.
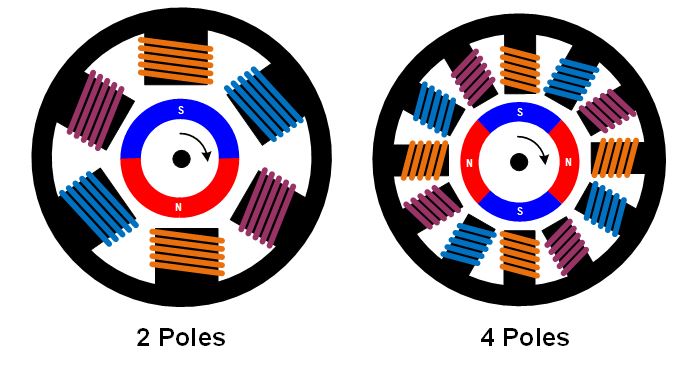
med tre faser kan motorer konstrueres med forskjellige magnetiske konfigurasjoner, kalt poler. De enkleste 3-fasede motorer har to poler: rotoren har bare ett par magnetiske poler, En Nord og En Sør. Motorer kan også bygges med flere poler, noe som krever flere magnetiske seksjoner i rotoren, og flere viklinger i statoren. Høyere pole teller kan gi høyere ytelse, men svært høye hastigheter er bedre oppnådd med lavere pole teller.
for å kjøre en trefaset børsteløs motor må hver av de tre fasene kunne kjøres til enten inngangsspenningen eller bakken. For å oppnå dette brukes tre «halvbro» – drivkretser, som hver består av to brytere. Bryterne kan være bipolare transistorer, Igbt eller Mosfet, avhengig av spenning og strøm som kreves.
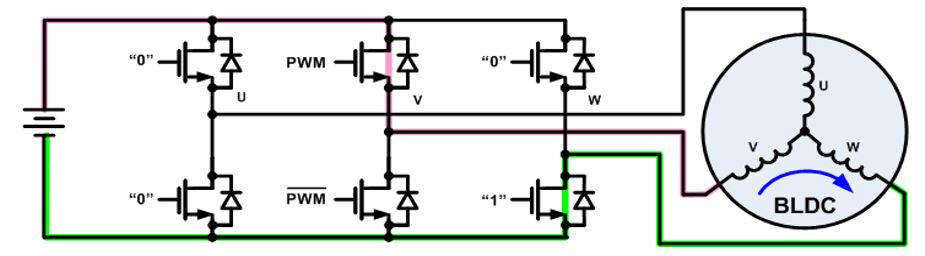
det finnes en rekke drivteknikker som kan benyttes for trefasede børsteløse motorer. Den enkleste kalles trapesformet, blokk eller 120 graders kommutasjon. Trapesformet kommutasjon ligner noe på kommutasjonsmetoden som brukes i EN DC-børstemotor. I denne ordningen er en av de tre fasene til enhver tid koblet til jord, en er åpen, og den andre drives til forsyningsspenningen. Hvis hastighet eller dreiemomentkontroll er nødvendig, er vanligvis fasen koblet til tilførselen pulsbreddemodulert. Siden fasene byttes brått ved hvert kommutasjonspunkt, mens rotorrotasjonen er konstant, er det en viss variasjon av dreiemoment (kalt dreiemoment rippel) når motoren roterer.
for høyere ytelse kan andre kommutasjonsmetoder brukes. Sinus, eller 180-graders, kommutasjon driver nåværende grundig alle tre motorfaser hele tiden. Drivelektronikken genererer en sinusformet strøm, selv om hver fase, hver skiftet 120 grader fra den andre. Denne drivteknikken minimerer dreiemoment rippel, samt akustisk støy og vibrasjon, og brukes ofte for høy ytelse eller høy effektivitet stasjoner.
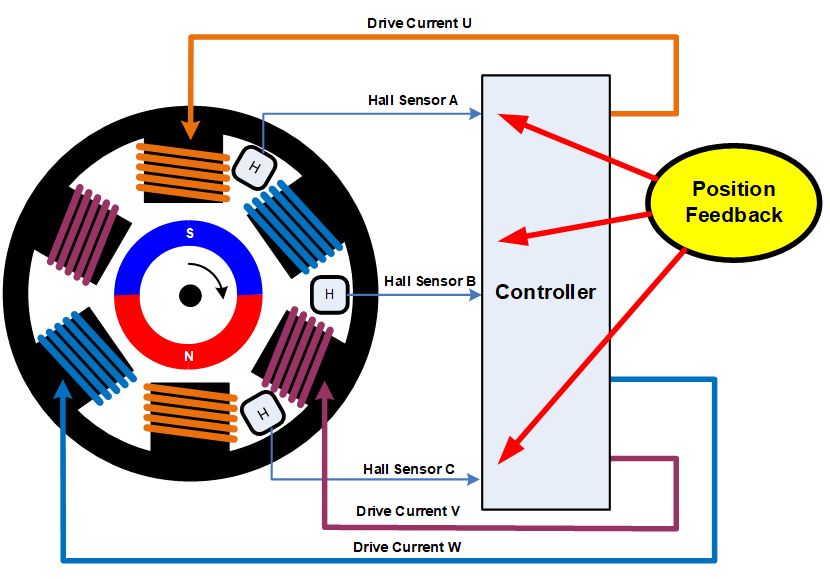
for å rotere feltet riktig, må kontrollelektronikken kjenne magnetens fysiske posisjon på rotoren i forhold til statoren. Ofte oppnås posisjonsinformasjonen ved Hjelp Av Hall sensorer som er montert på statoren. Når den magnetiske rotoren svinger, henter Hall-sensorene rotorens magnetfelt. Denne informasjonen brukes av drivelektronikken til å passere strøm gjennom statorviklingene i en sekvens som får rotoren til å snurre.
ved hjelp av tre hallsensorer kan trapesformet kommutasjon implementeres med enkel kombinasjonslogikk, slik at ingen sofistikert kontrollelektronikk er nødvendig. Andre kommutasjonsmetoder, som sinus kommutasjon, krever litt mer sofistikert kontrollelektronikk, og bruker vanligvis en mikrokontroller.
i tillegg til å gi posisjonstilbakemelding ved Hjelp Av Hallsensorer, finnes det ulike metoder som kan brukes til å bestemme rotorposisjonen uten sensorer. Det enkleste er å overvåke BAKSIDEN EMF på en undriven fase for å fornemme magnetfeltet i forhold til statoren. En mer sofistikert kontrollalgoritme, Kalt Feltorientert Kontroll ELLER FOC, beregner posisjonen basert på rotorstrømmer og andre parametere. FOC krever vanligvis en ganske kraftig prosessor, da det er mange beregninger som må utføres veldig raskt. Dette er selvsagt dyrere enn en enkel trapesformet kontrollmetode.
Børsteløse Motorer: Fordeler Og Ulemper
avhengig av bruksområdet ditt, er det grunner til at du kan velge å bruke en børsteløs motor over en børstet motor. Følgende tabell oppsummerer de viktigste fordelene og ulempene ved hver motortype:
| Børstet motor | Børsteløs motor | |
| Levetid | Kort (børster slites ut) | Lang (ingen børster å bære) |
| Hastighet Og Akselerasjon | Middels | Høy |
| Effektivitet | Middels | Høy |
| Elektrisk Støy | Støyende (bushbue) | Stille |
| Akustisk Støy & Dreiemoment Rippel | Dårlig | Medium (trapesformet) eller god (sinus) |
| Kostnad | Laveste | Medium (lagt til elektronikk) |
Levetid
som tidligere nevnt er en av ulempene med børstede motorer at det er mekanisk slitasje på børster og kommutator. Kullbørster spesielt er offer, og i mange motorer de er utformet for å bli erstattet med jevne mellomrom som en del av et vedlikeholdsprogram. Kommutatorens myke kobber blir også sakte slitt av børstene, og til slutt når et punkt der motoren ikke lenger vil fungere. Siden børsteløse motorer ikke har noen bevegelige kontakter, lider de ikke av denne slitasje.
Hastighet Og Akselerasjon
Børstede motorer rotasjonshastighet kan begrenses av børster og kommutator, så vel som massen av rotoren. Ved svært høye hastigheter, kan børsten til kommutator kontakt bli uberegnelig, og børste lysbue øker. De fleste børstede motorer bruker også en kjerne av laminert jern i rotoren, noe som gir dem stor rotasjons treghet. Dette begrenser akselerasjonen og retardasjonshastigheten til motoren. Det er mulig å bygge en børsteløs motor med svært kraftige sjeldne jordmagneter på rotoren, noe som minimerer rotasjons treghet. Selvfølgelig øker det kostnadene.
Elektrisk Støy
børstene og kommutatoren danner en slags elektrisk bryter. Når motoren svinger, åpnes og lukkes bryterne, mens betydelig strøm strømmer gjennom rotorviklingene, som er induktive. Dette resulterer i overslag på kontaktene. Dette genererer en stor mengde elektrisk støy, som kan bli koblet til følsomme kretser. Arcing kan reduseres noe ved å legge til kondensatorer eller RC-snubbere over børstene, men øyeblikkelig bytte av kommutatoren genererer alltid noe elektrisk støy.
Akustisk Støy
Børstede motorer er «hardt slått» – det vil si at strømmen plutselig flyttes fra en vikling til en annen. Dreiemomentet som genereres varierer over rotasjonen av rotoren som viklingene blir slått på og av. Med en børsteløs motor er det mulig å styre viklingsstrømmene på en måte som gradvis overgår strøm fra en vikling til en annen. Dette senker dreiemoment rippel, som er en mekanisk pulsering av energi på rotoren. Torque ripple forårsaker vibrasjon og mekanisk støy, spesielt ved lave rotorhastigheter.
Kostnad
siden børsteløse motorer krever mer sofistikert elektronikk, er den totale kostnaden for en børsteløs stasjon høyere enn en børstemotor. Selv om en børsteløs motor er enklere å produsere enn en børstet motor, siden den mangler børster og en kommutator, er børstet motorteknologi svært moden og produksjonskostnadene er lave. Dette endrer seg etter hvert som børsteløse motorer blir mer populære, spesielt i applikasjoner med høyt volum som bilmotorer. Også kostnaden for elektronikk, som mikrokontrollere, fortsetter å synke, noe som gjør børsteløse motorer mer attraktive.
Sammendrag
på grunn av fallende kostnader og bedre ytelse, børsteløse motorer er stadig i popularitet i mange programmer. Men det er fortsatt steder der børstede motorer gir mer mening.
Mye kan læres ved å se på adopsjon av børsteløse motorer i biler. Fra og med 2020 har de fleste motorer som kjører når bilen kjører – ting som pumper og vifter – flyttet fra børsteløse motorer til børsteløse motorer for økt pålitelighet. Den ekstra kostnaden for motor og elektronikk mer enn gjør opp for lavere rate av feltet feil og redusert vedlikeholdskrav.
på den annen side har motorer som drives sjelden-for eksempel motorer som beveger kraftseter og elektriske vinduer-forblitt hovedsakelig børstemotorer. Begrunnelsen er at den totale kjøretiden over bilens levetid er svært liten, og det er svært lite sannsynlig at motorene vil mislykkes i bilens levetid.
da kostnadene for børsteløse motorer og tilhørende elektronikk fortsetter å synke, finner børsteløse motorer seg inn i applikasjoner som tradisjonelt har blitt holdt av børstede motorer. Som et annet eksempel fra bilindustrien har setejusteringsmotorer i high end-kort tatt i bruk børsteløse motorer fordi de genererer mindre akustisk støy.
Få teknisk støtte