Skipstabilisatorer og stabiliseringssystemer
et skip til sjøs har seks frihetsgrader, dvs.
1. Rull, 2. Heave, 3. Pitch, 4. Yaw, 5. Svaie, 6. Bølge.
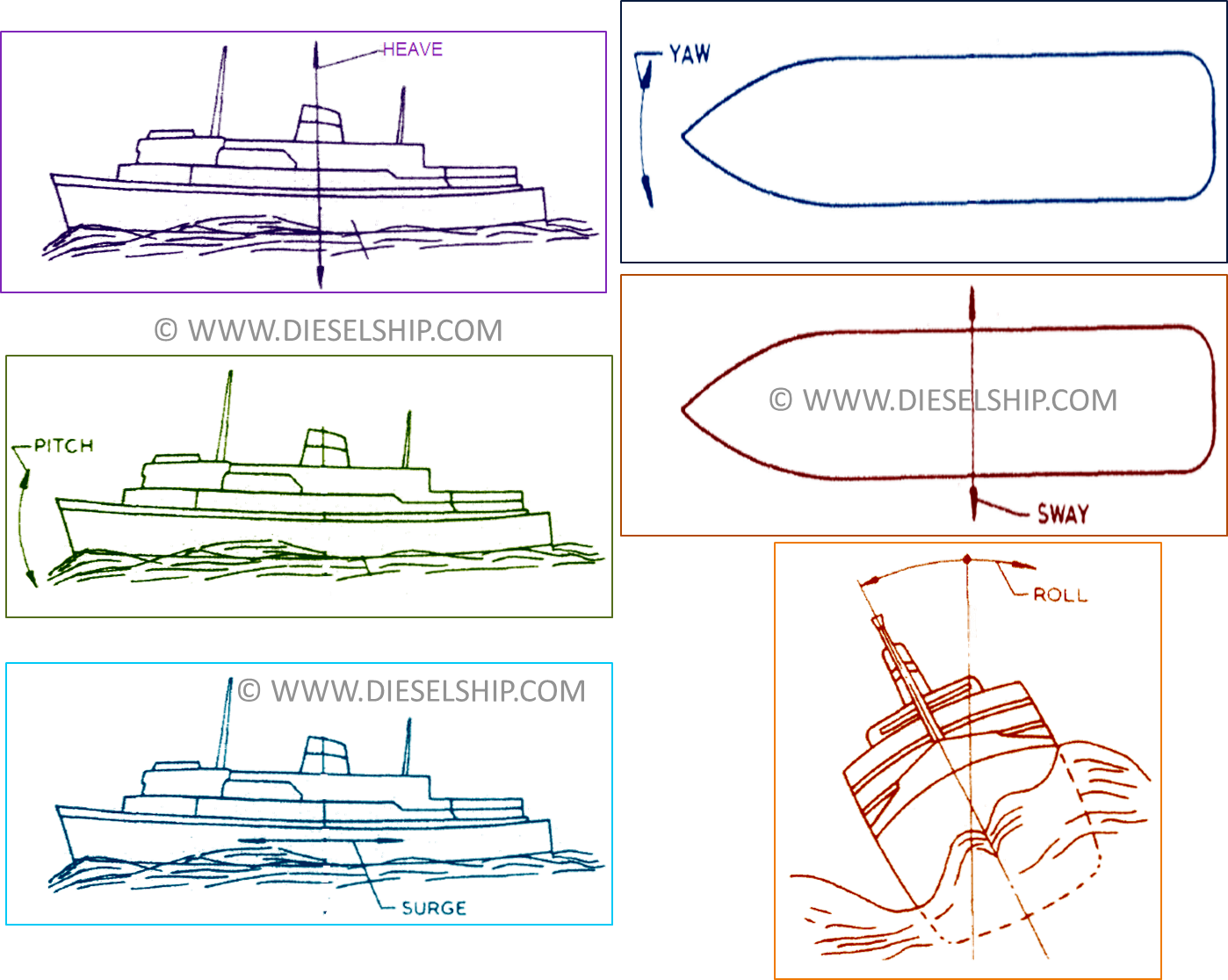
– av alle disse bevegelsene kan bare rullende bevegelser effektivt reduseres i praksis ved å montere lensekjøl, antirullingstanker eller stabilisatorer.
– det er to grunnleggende stabiliseringssystemer som brukes på skip;
- finstabilisatorene
- Tankstabiliseringssystem.
fin stabilisatorer
Grunnleggende Drift:
har du noen gang prøvd dette mens du reiser i en bil??
Åpne vinduskjoldet og la deg dele ut alle figurene dine sammen mot fremoverretningen med håndflaten mot veien mens bilen beveger seg fremover i litt fart og sørg for at fingrene dine er rette.
ved denne tilstanden vil hånden din holde seg rett og du vil ikke møte noen kraft over eller under fingrene dine.
1. Nå litt løft fingrene oppover, og du vil se at det er et løft under fingrene og hånden vil tendens til å gå oppover dette kalles som en ‘heis’.
2. Nå legger alle fingrene nedover vil du se det er en heis push kraft på toppen av hånden og hånden vil tendens til å gå nedover dette kalles en ‘push ‘ eller’Nedover løft’
3. Nå tregere bilen og redusere hastigheten og gjenta trinnene ovenfor vil du se heisen og push kraft er betydelig redusert, noe som betyr dra hastigheten er viktigere å ha en god heis eller en push.
ovennevnte teknikk forklarer bare grunnleggende Av Dra, Positiv løft og Negativ løft av en aerofolie eller Hydrofoil finner som brukes på skip.
Fin stabilisatorer
– stabiliserende kraften av finnene er generert av deres bevegelse gjennom havet (Dra Kraft) og løft’ skapt av strømmen av vann over og under ‘aerofoil’ eller hydrofoil form.
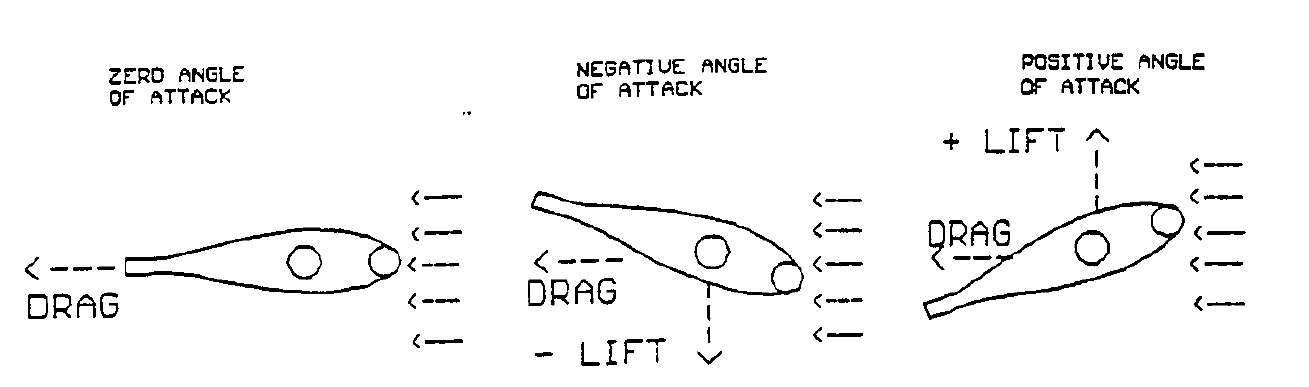
Null Angrepsvinkel:
Negativ & Positiv Angrepsvinkel:
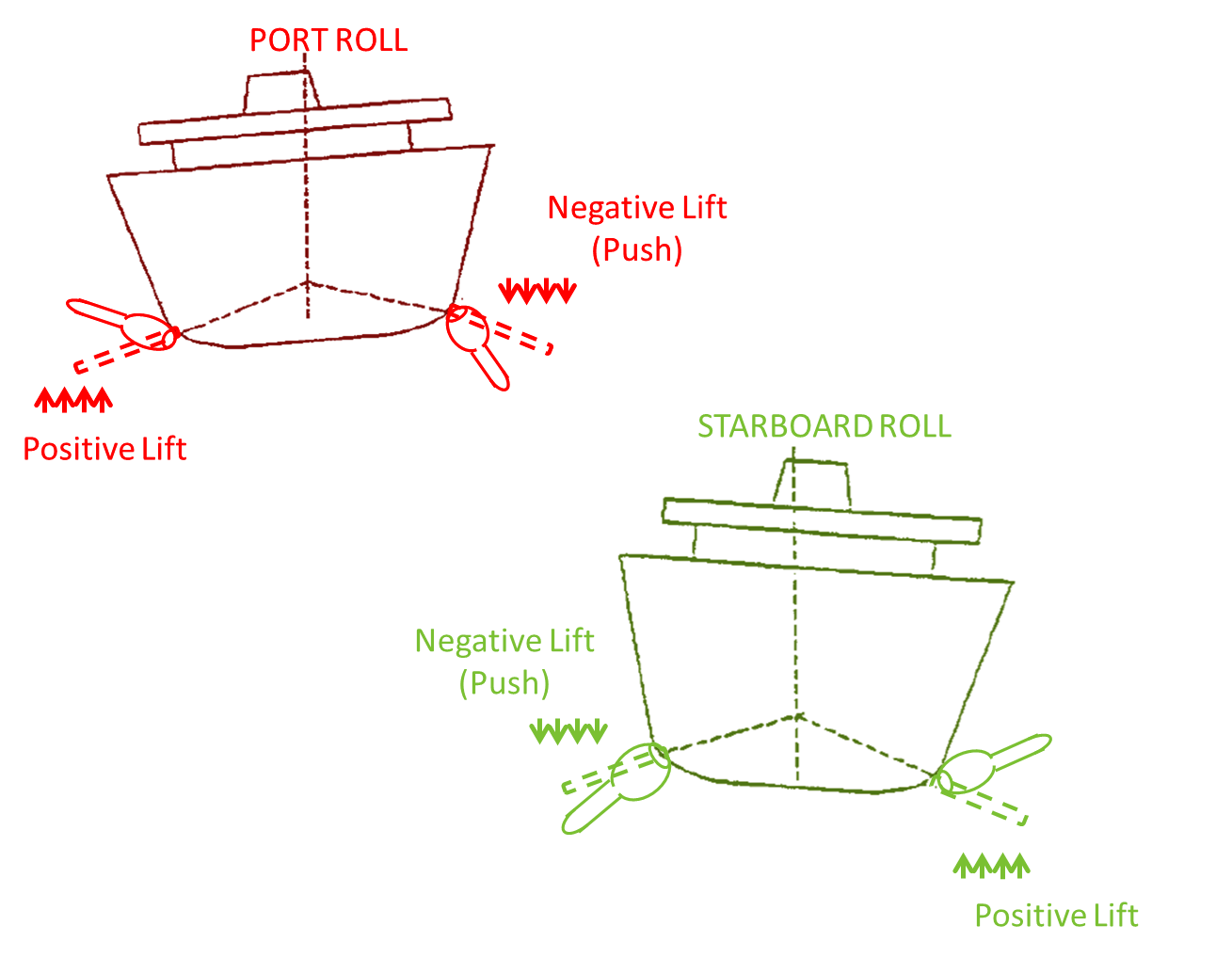
– når forkanten av finnen er vippet opp, gir vannstrømmen over toppen av profilen løft på grunn av trykkfall mens et løftetrykk leveres av strømning langs undersiden. Nedover tilt av den fremre kanten av finen, inverterer effekten, slik at et trykkfall oppstår på undersiden og økt trykk på toppen for å gi en nedadgående kraft.
– uten en rimelig hastighet for fremoverbevegelse (Dra) av skipet, er finnene ineffektive. Dermed er denne typen aktive finstabilisatorer montert på de raskere skipstypene, som opererer på kanskje femten eller flere knuter.
Type Finner
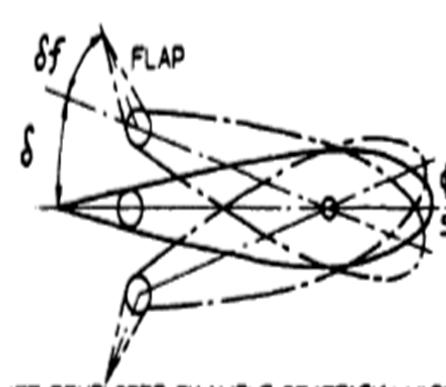
Svømmeføtter med alle bevegelige overflater
 Svømmeføtter med alle bevegelige overflater med ekstra haleklaff
Svømmeføtter med alle bevegelige overflater med ekstra haleklaff
Svømmeføtter med fast struktur
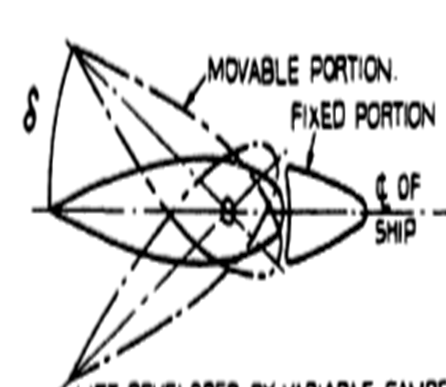
– Ikke-uttrekkbare finner brukes ofte der plass i skroget er begrenset. De er vanligvis montert ved lensens sving og projiserer ikke utover den vertikale linjen fra skipets side eller under den horisontale linjen på skipets bunn, for å minimere risikoen for kontakt med en kaivegg eller kaibunnen.
– finakselen, som finen er stivt festet til, passerer gjennom en sjøkjertel i en monteringsplate sveiset eller boltet til skroget og støttes av to betydelige lagre, en dobbeltendespak tastet til den indre enden av finakselen aktiveres av hydrauliske rammer levert fra en elektrisk drevet variabel leveringspumpe.
hvordan styres finbevegelsen?
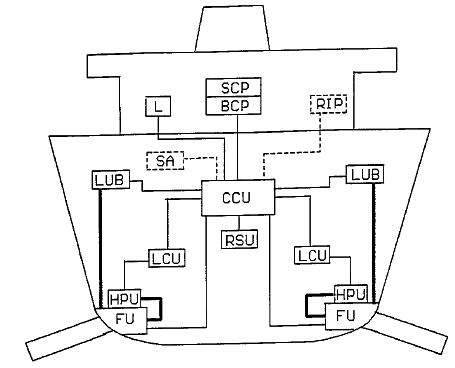
Tykkere Linjer = Hydrauliske Linjer; Tynnere Linjer = Elektriske Linjer
SCP = SOLAS Kontrollpanel, BCP = Brokontrollpanel, L = Skipslogg, Rip = Fjernindikatorpanel, SA = Skipets Automatisering , LUB = Smøreoljetank, CCU = Sentral Kontrollenhet, RSU = Rullesensorenhet, LCU = Lokal Kontrollenhet , Hpu = Hydraulisk Kraftenhet, FU = Finenhet.
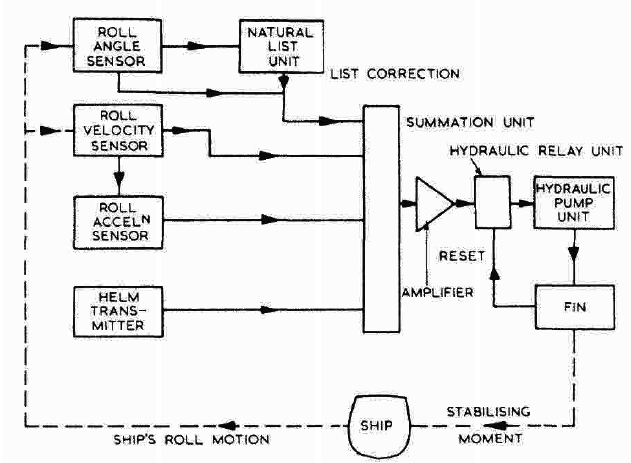
– Kontroll av finbevegelse er automatisk og er vanligvis avledet fra gyroskopisk sensorutstyr som i sin enkleste form-hastighetskontroll-er basert på et lite, elektrisk drevet gyroskop montert horisontalt med sin akse athwartships.
– vinkelhastigheten til skipets rulle fører til at gyroskopet behandler mot sentraliserende fjærer til en mengde proporsjonal med hastigheten, og det genererer en liten kraft som hydraulisk forsterkes av en hydraulisk releenhet for å gi tilstrekkelig kraft til å betjene kontrollene til den variable leveringspumpen via egnet kobling.
– En Del av koblingen er koblet til finakselen for å overføre et kanselleringssignal til pumpekontrollen og for å få finen til å hvile i vinkelen som kreves av sensorenheten.
– denne typen kontroll er ofte montert i små installasjoner, vanligvis av økonomiske årsaker, og er mest effektiv mot resonansrulling.
– Skip ruller sjelden i ren resonansmodus; havstaten er ofte svært forvirret. Mer forseggjort, og dyrere, kontrollsystemer er nødvendig for å håndtere plutselig anvendt roll, rullende på perioder av resonans og rullende i forhold som følge av kombinasjonen av flere bølgefrekvenser.
RSU-Roll Sensor Enhet I Detalj (Kompensert kontrollsystem)
 – Rullereduksjon på over 90%, typisk 30° ut-til-ut redusert til mindre enn 3° ut-til-ut, kan oppnås ved resonans og lave restruller kan opprettholdes over et bredt spekter av frekvenser. Men siden stabiliseringskraften varierer som kvadratet av skipets hastighet, er finnene minst effektive ved lav eller null hastighet der de bare fungerer som ekstra lensekjøl.
– Rullereduksjon på over 90%, typisk 30° ut-til-ut redusert til mindre enn 3° ut-til-ut, kan oppnås ved resonans og lave restruller kan opprettholdes over et bredt spekter av frekvenser. Men siden stabiliseringskraften varierer som kvadratet av skipets hastighet, er finnene minst effektive ved lav eller null hastighet der de bare fungerer som ekstra lensekjøl.